1. 驱动编程
1.1. IMX6ULL GPIO操作说明
1.1.1. GPIO模块资源说明
参考资料:芯片手册《Chapter 26 : General Purpose Input/Output (GPIO)》
一共5组GPIO,每组最多32个,实际上每组可能没有这么多可用的。
GPIO1 有 32 个引脚: GPIO1_IO0~GPIO1_IO31 GPIO2 有 22 个引脚: GPIO2_IO0~GPIO2_IO21 GPIO3 有 29 个引脚: GPIO3_IO0~GPIO3_IO28 GPIO4 有 29 个引脚: GPIO4_IO0~GPIO4_IO28 GPIO5 有 12 个引脚: GPIO5_IO0~GPIO5_IO11
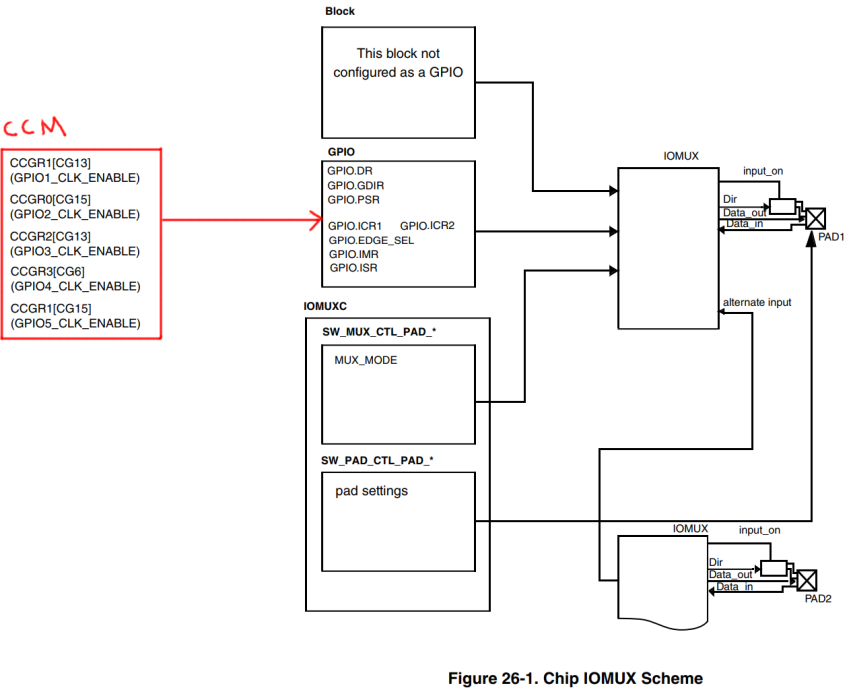
控制GPIO模块分为3大模块:CCM 、 IOMUXC 、 GPIO模块本身;
CCM:设置GPIO模块时钟使能;
IOMUXC :复用功能选择;
GPIO:设置输入输出上下拉等功能。
所以要想使用GPIO,需要三步:
通过CCM模块设置GPIOx时钟使能
通过IOMUXC:选择GPIOx引脚的复用功能,以及上下拉等功能
通过GPIO模块本身,设置输入输出,读取或者设置输出高低电平
1.1.2. 使能GPIO模块的时钟
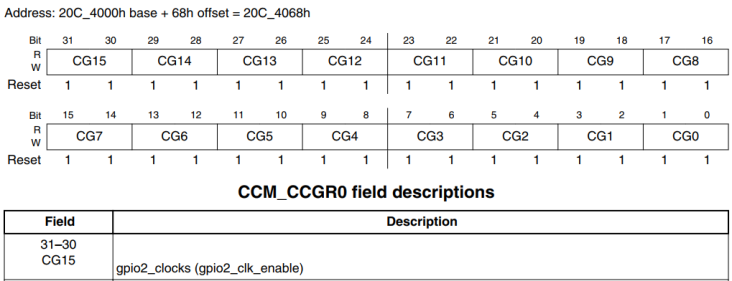
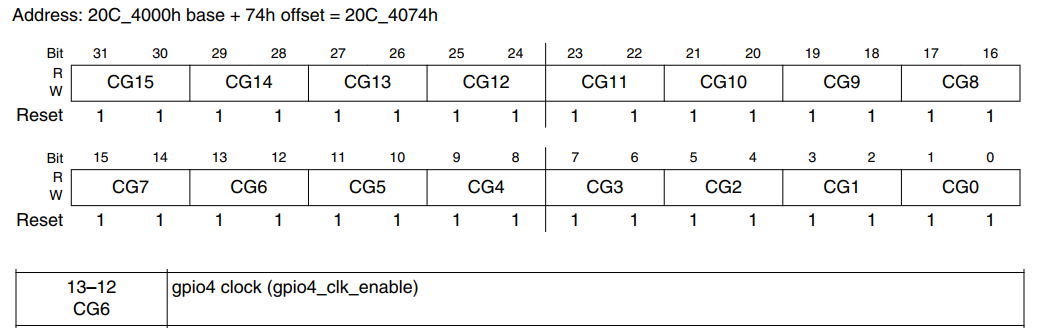
CCM可以用来设置是否使能GPIO模块的时钟,通过设置CCM_CCGRy寄存器中的2位来决定GPIOx模块的时钟是否使能。
 image-20200528111936917
image-20200528111936917
| 值 | 说明 |
|---|---|
| 00 | 一直关闭时钟 |
| 01 | 该GPIO 模块在 CPU run mode 情况下是使能的;在 WAIT 或 STOP 模式下,关闭 |
| 10 | 保留 |
| 11 | 一直使能时钟 |
GPIO2模块的时钟使能有CCM_CCGR0寄存器的位决定
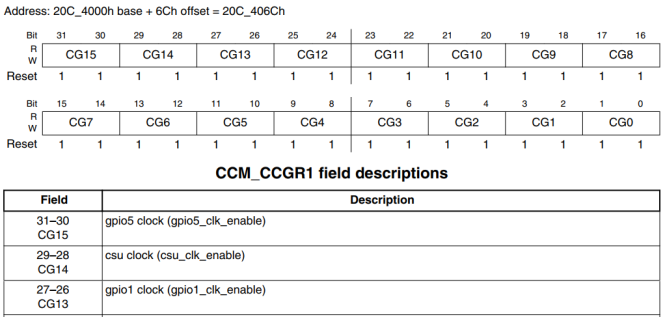
GPIO1-5模块的时钟使能有CCM_CCGR1寄存器决定
GPIO3模块的时钟使能有CCM_CCGR2寄存器决定
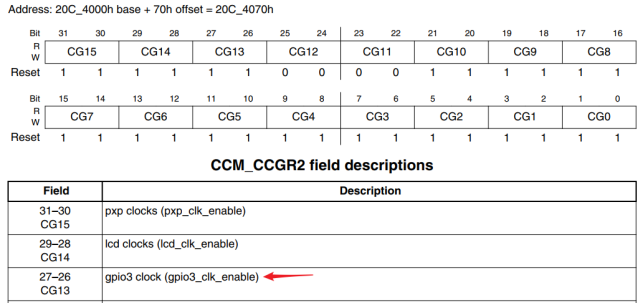
GPIO4模块的时钟使能有CCM_CCGR2寄存器决定
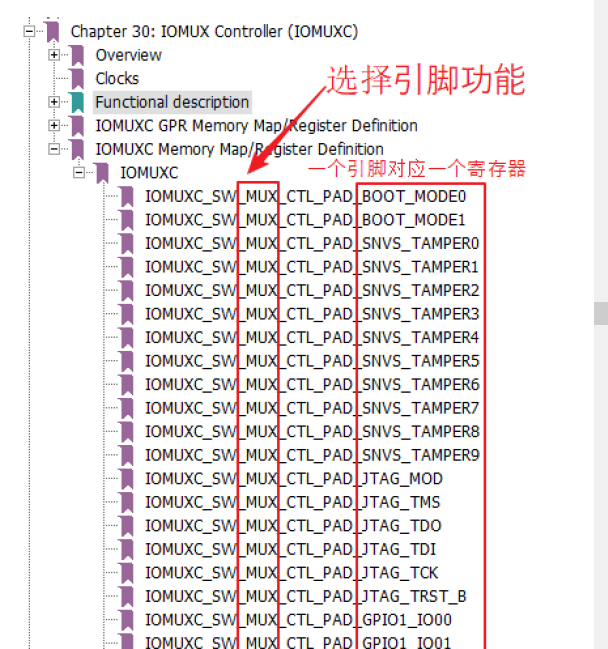
1.1.3. 选择复用功能
IOMUXC模块可以设置引脚的模式 Mode 、功能。参考资料:芯片手册《Chapter 3 2 : IOMUX Controller (IOMU XC) 》
对于某个某组引脚, IOMUXC 中有 2 个寄存器用来设置它:
IOMUXC_SW_MUX…… :设置复用功能
IOMUXC_SW_PAD……:设置上下拉等参数
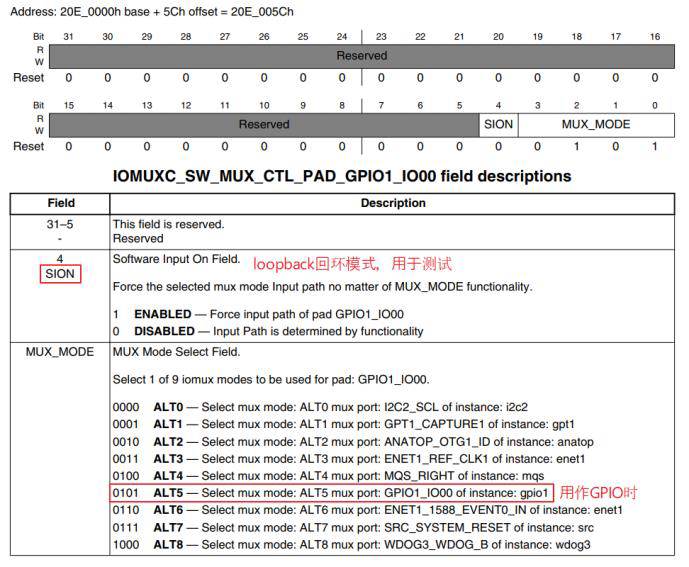
1.1.3.1. 选择复用功能
IOMUXC_SW_MUX_CTL_PAD_x :某个引脚的功能寄存器
IOMUXC_SW_MUX_CTL_GRP_
例如GPIO1_IO00引脚,当把IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO00寄存器的MUX_MODE(bit【0-3】)的位设置为0101(ALT5) 时,GPIO1_IO00引脚被设置为了GPIO功能。
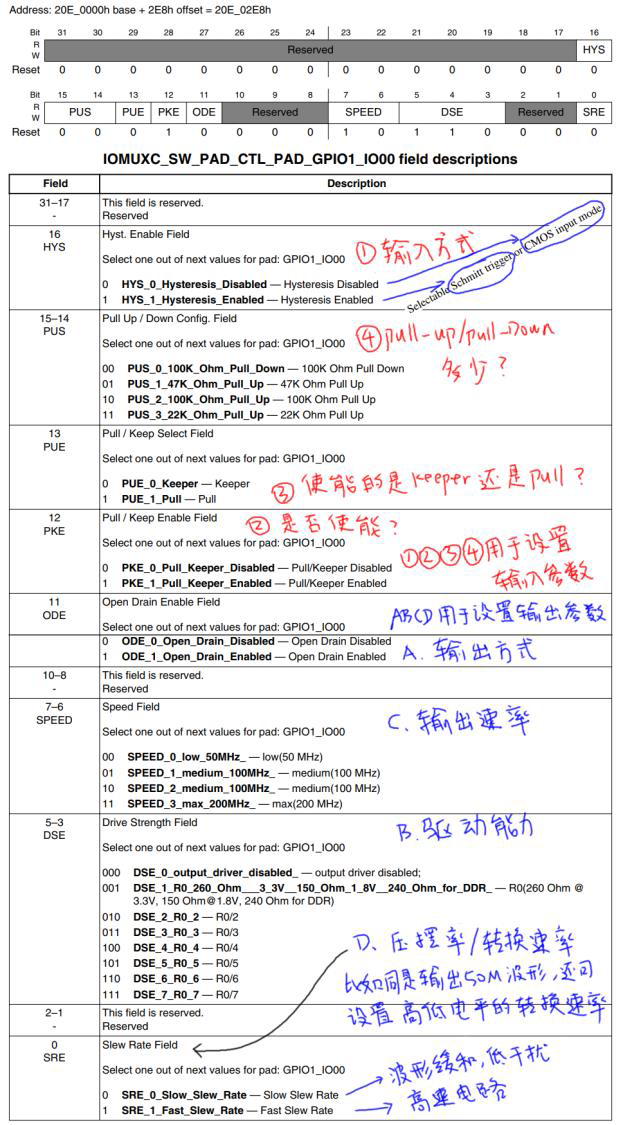
1.1.3.2. 设置上下拉电阻等参数
IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO00 寄存器是设置GPIO1_IO00引脚的上下拉等参数的。其他的引脚也是类似,看数据手册即可。
1.1.4. GPIO模块输入输出设置
内部框图如下:
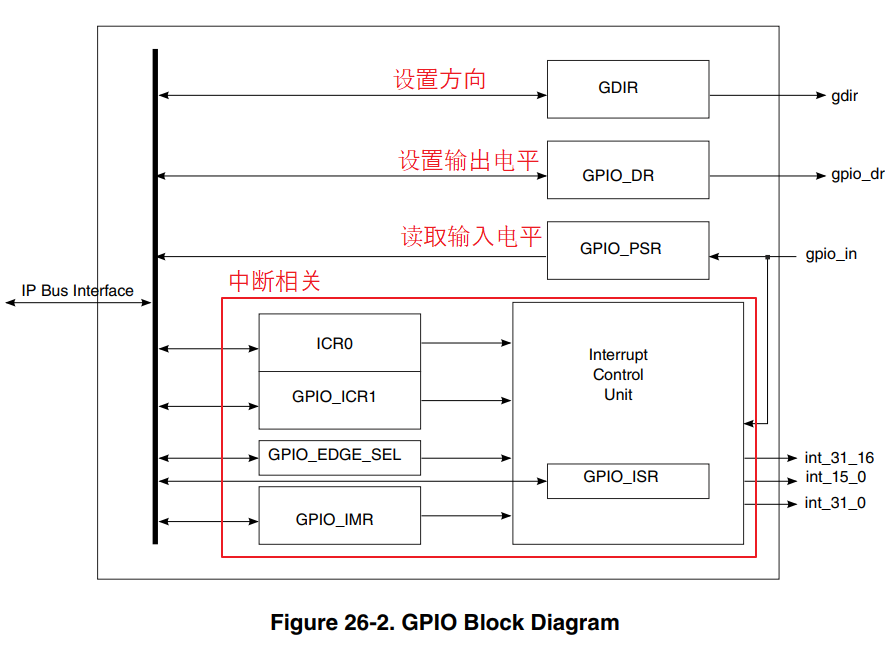
只关心三个寄存器:
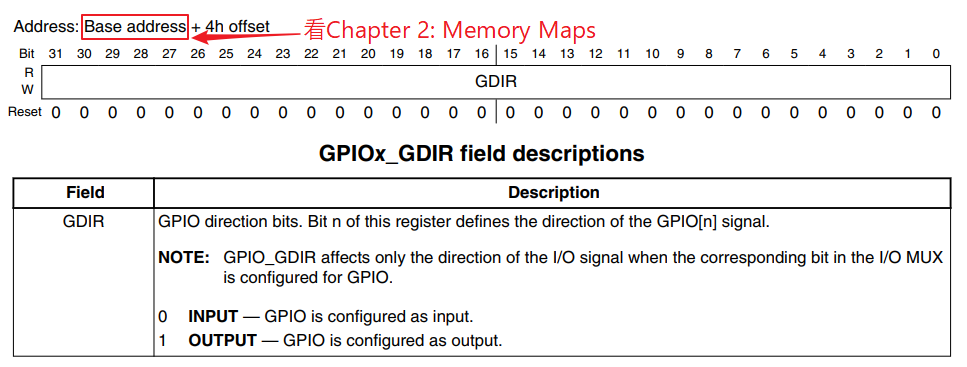
GPIOx_GDIR :设置引脚方向,每位对应一个引脚 1 output 0 input
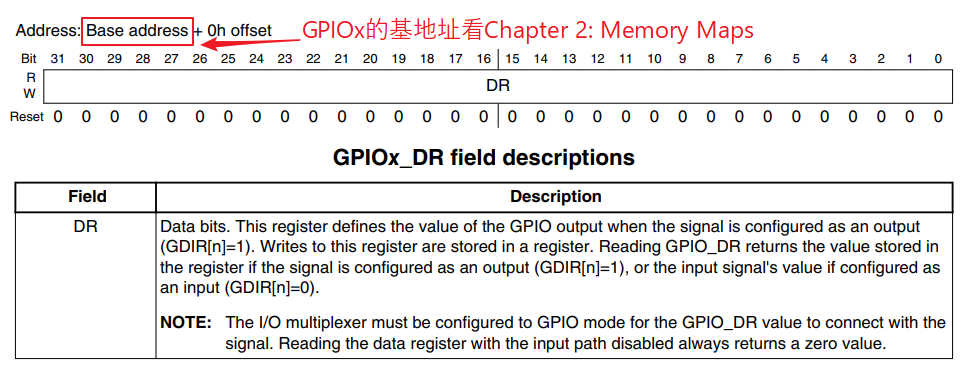
GPIOx_GDIR :设置输出引脚的电平,每位对应一个引脚 1 高电平, 0 低电平
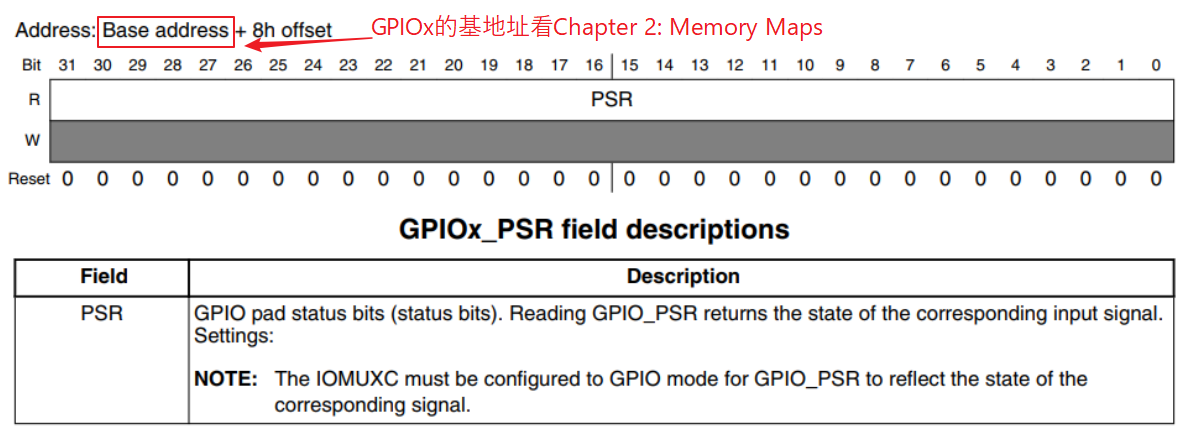
GPIOx_PSR :读取引脚的电平,每位对应一个引脚 1 高电平, 0 低电平
1.1.5. 编程步骤
1.1.5.1. 读GPIO引脚
① 设置CCM_CCGRx寄存器中某位使能对应的GPIO模块 // 默认是使能的,上图省略了 ② 设置IOMUX来选择引脚用于GPIO ③ 设置GPIOx_GDIR中某位为0,把该引脚设置为输入功能 ④ 读GPIOx_DR或GPIOx_PSR得到某位的值(读GPIOx_DR返回的是GPIOx_PSR的值)
1.1.5.2. 写GPIO引脚
① 设置CCM_CCGRx寄存器中某位使能对应的GPIO模块 // 默认是使能的,上图省略了 ② 设置IOMUX来选择引脚用于GPIO ③ 设置GPIOx_GDIR中某位为1,把该引脚设置为输出功能 ④ 写GPIOx_DR某位的值
需要注意的是,你可以设置该引脚的loopback功能,这样就可以从GPIOx_PSR中读到引脚的有实电平;你从GPIOx_DR中读回的只是上次设置的值,它并不能反应引脚的真实电平,比如可能因为硬件故障导致该引脚跟地短路了,你通过设置GPIOx_DR让它输出高电平并不会起效果。
1.2. RK3288 GPIO操作说明
1.2.1. GPIO模块资源说明
一共9组(GPIO0-GPIO8),每组又分为四个小组port A、B、C、D,每个小组最多8个IO,所以理论上一组GPIO最多32个,实际上每组可能没有这么多可用的。比如 GPIO0 只有 GPIO0_A0 -A7 、 GPIO0_B0-B7 、 GPIO0_C0 -C2 这些引脚。
RK3288 GPIO模块框图
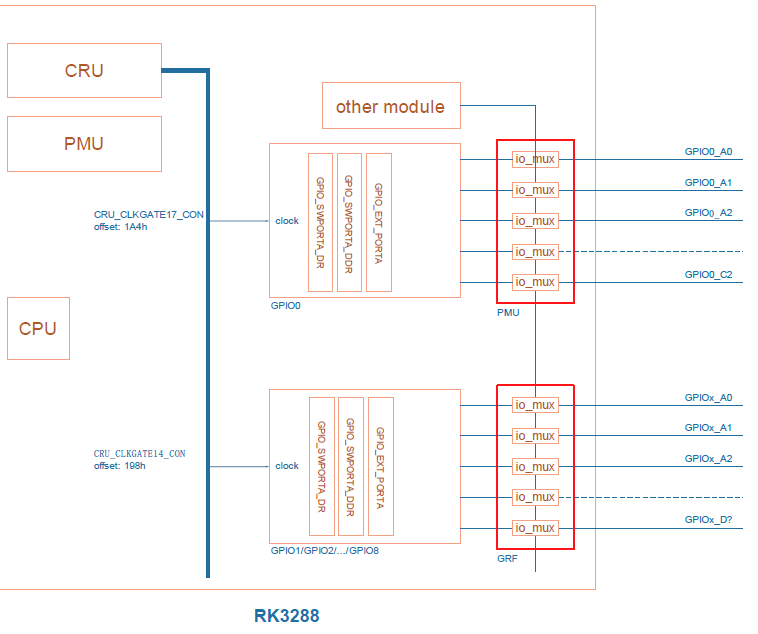 image-20200528144426090
image-20200528144426090
GPIO的控制涉及 4 大模块: CRU 、 PMU 、 GRF 、 GPIO 模块本身
CRU :用于设置是否向 GPIO 模块提供时钟;
PMU :
GRF :
GPIO :
所以要想使用GPIO就得有以下步骤:
1.2.2. 使能GPIO 时钟
CRU 用于设置是否向 GPIO 模块提供时钟:内部框图如下:
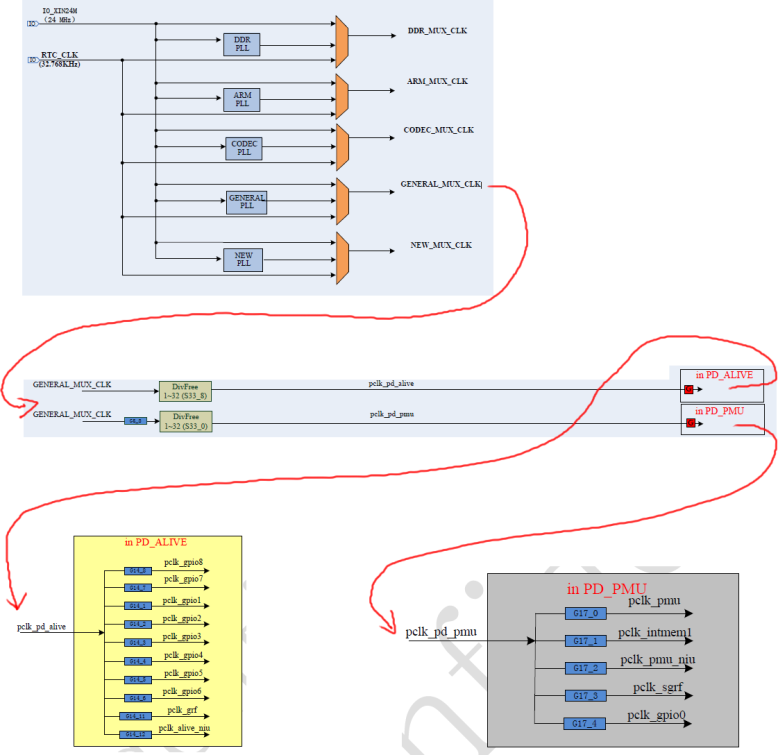
可以设置寄存器使能GPIOx 的时钟:
CRU_CLKGATE17_CON用于控制 GPIO0
CRU_CLKGATE14_CON用于控制 GPIO1-8
1.2.3. PMU控制电源:
电源管理单元里,有多个电源域(power domain ,简称为 PM),在一个域下有多个设备。 比如PD_ALIVE ,它下面有这些设备 CRU 、 GRF 、 GPIO 1~8 、 TIMER 或 WDT 。 比如PD_PMU ,它下面有这些设备 PMU 、 SRAM(4K) 、 Secure GRF 、 GPIO0 。 可见,GPIO0 、 GPIO1~8 分属不同的 PMU 。GPIO0、 GPIO1~8 都是常供电的 ,它们是否工作取决于其时钟是否使能。
1.2.4. 设置引脚的模式 (Mode 、功能GPIO0)
GPIO0比较特殊,为了让其引脚用于 GPIO 功能,要设置 PMU 里的相关寄存器。 GPIO1-8 类似,为了让其引脚用于 GPIO 功能,要设置 GRF 里的相关寄存器。
1.2.5. GPIO模块内部
方向:引脚设置为GPIO 时,可以继续设置寄存器 GPIO_SWPORTA_DDR 确定它是输出引脚,还是输入引 脚。 数值:对于输出引脚,可以设置寄存器GPIO_SWPORTA_DR 让它输出高、低电平 对于输入引脚,可以读取寄存器 GPIO_EXT_PORTA 得到引脚的当前电平 。
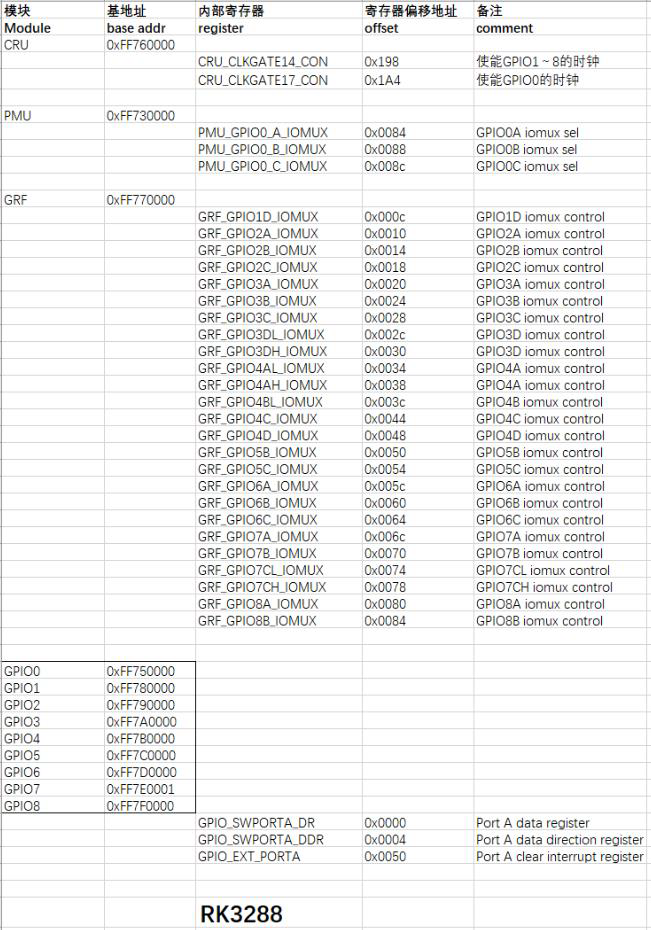
1.2.6. RK3288相关寄存器偏移地址
1.3. 字符设备驱动
1.3.1. Linux设备号
1.3.1.1. 设备号组成
Linux提供dev_t的数据类型表示设备号:高12位主设备号(大小:0-4095),低20位位次设备号
include/linux/types.h
typedef __u32 __kernel_dev_t;
typedef __kernel_dev_t dev_t; // 所以可以看出dev_t就是一个uint32_t 的数据
1.3.1.2. 设备号常用函数
include/linux/kdev_t.h
#define MINORBITS 20
#define MINORMASK ((1U << MINORBITS) - 1)
#define MAJOR(dev) ((unsigned int) ((dev) >> MINORBITS)) // 从设备号中得到主设备号
#define MINOR(dev) ((unsigned int) ((dev) & MINORMASK)) // 从设备号中得到次设备号
#define MKDEV(ma,mi) (((ma) << MINORBITS) | (mi)) // 把主设备号和次设备号组装成dev_t类型的linux设备号
1.3.2. 注册字符设备并确定设备号
1.3.2.1. linux用cdev表示一个字符设备
struct cdev {
struct kobject kobj;
struct module *owner;
const struct file_operations *ops; // 操作函数集合
struct list_head list;
dev_t dev; // 设备id
unsigned int count;
};
1.3.2.2. 入口函数中定义字符设备步骤如下
struct cdev testcdev; // 定义字符设备结构体
testcdev.owner = THIS_MODULE;
cdev_init(&testcdev, &test_fops); // 字符设备结构体 初始化
cdev_add(&testcdev, devid, 1); // 把字符设备添加到linux内核中
1.3.2.3. 出口函数删除字符设备
cdev_del(&testcdev);
1.3.2.4. 函数原型介绍
/**
*
*@cdev:字符设备
*@fops:file_operations结构体指针
*/
void cdev_init(struct cdev *cdev, const struct file_operations *fops)
/**
*用于向 Linux系统添加字符设备 (cdev结构体变量 )
*@p:指向要往系统添加的字符设备
*@count:要添加的设备数量
*/
int cdev_add(struct cdev *p, dev_t dev, unsigned count)
/**
*驱动卸载的时候要从linux内核中卸载字符设备
*@p:指向要往系统添加的字符设备
*/
void cdev_del(struct cdev *p)
在 2.4 的内核我们使用 major = register_chrdev(0, "xym_led", &led_drv) 来进行字符设备注册,在注册过程中分配了设备号,这种方式每一个主设备号只能存放一种设备,它们使用相同的 file_operation 结构体,也就是说内核最多支持 256 个字符设备驱动程序。
在 2.6 的内核之后,新增了一个 register_chrdev_region 函数,它支持将同一个主设备号下的次设备号进行分段,每一段供给一个字符设备驱动程序使用,使得资源利用率大大提升,同时,2.6 的内核以后保留了原有register_chrdev 方法。在 2.6 的内核中这两种方法都会调用到 __register_chrdev_region 函数进行设备节点的分配。
1:老版本的内核在入口函数都是使用register_chrdev函数来确定主设备号
major = register_chrdev(0, "xym_led", &led_drv); // 第一个参数是0的话表示自动申请设备号
调用关系
register_chrdev
-》__register_chrdev(major, 0, 256, name, fops)
-》__register_chrdev_region(major, baseminor, count, name)
-》cdev = cdev_alloc();
-》cdev_add
从上面的调用关系可以看出,register_chrdev不仅仅完成了设备号的申请,还完成了字符设备cdev的创建和添加到内核工作
2:新版本在入口函数中使用register_chrdev_region或者alloc_chrdev_region函数获取主设备号
if(major){
devid = MKDEV(major, 0);
register_chrdev_region(devid, 1, "xym_led"); /* 设备号事先确定的情况 */
}else{
alloc_chrdev_region(&devid, 0, 1, "xym_led"); /* 设备号事先不确定,申请设备号 */
major = MAJOR(devid); /* 获取主设备号 */
minor = MINOR(devid); /* 获取次设备号 */
}
/* 这里 需要手动创建字符设备,并添加到内核 */
struct cdev cdev;
cdev.owner = THIS_MODULE;
cdev_init(&cdev, &led_drv);
cdev_add(&cdev, devid, 1);
调用关系 1
register_chrdev_region
-》__register_chrdev_region(MAJOR(n), MINOR(n),next - n, name);
调用关系 2
alloc_chrdev_region
-》__register_chrdev_region(0, baseminor, count, name);
从调用关系可以看出无论是新版本还是老版本,获取设备号的方式,最总都是 __register_chrdev_region函数实现,只是老版本register_chrdev不仅仅会分配设备号,还创建了并向内核添加了字符设备cdev
老版本用到函数,原型如下:
/**
* 设备号释放函数
*@major :主设备号,如果为0,那么系统默认会自动获取主设备号返回
*@name:设备名字
*@fops: 驱动的 file_operations函数集合
*/
include/linux/fs.h
static inline int register_chrdev(unsigned int major, const char *name,
const struct file_operations *fops)
{
/*
* 这个地方就是我们说的为什么使用register_chrdev函数获取设备号的时候次设备号一下子就没了,这里从0开 * 始,申请了256个次设备号,就是一个主设备号major号下的256个次设备号(0-255)全用完了
*/
return __register_chrdev(major, 0, 256, name, fops);
}
int __register_chrdev(unsigned int major, unsigned int baseminor,
unsigned int count, const char *name,
const struct file_operations *fops)
{
struct char_device_struct *cd;
struct cdev *cdev;
cd = __register_chrdev_region(major, baseminor, count, name);// 申请设备号
cdev = cdev_alloc(); // 创建cdev
cdev->owner = fops->owner;
cdev->ops = fops;
kobject_set_name(&cdev->kobj, "%s", name);
err = cdev_add(cdev, MKDEV(cd->major, baseminor), count); // 增加cdev到内核
cd->cdev = cdev;
return major ? 0 : cd->major;
…………………
}
释放字符设备函数
/**
* 设备号释放函数
*@major :主设备号,如果为0,那么系统默认会自动获取主设备号返回
*@name:设备名字
*/
static inline void unregister_chrdev(unsigned int major, const char *name)
新版本用到函数,原型如下:
1:如果设备号已经确定,那么使用 register_chrdev_region 函数 申请设备id
/**
* 需要在驱动的入口函数申请设备号
*@from :要从哪个设备id开始申请设备号
*@count :要申请的设备号数量。
*@name :设备名字
*/
int register_chrdev_region(dev_t from, unsigned count, const char *name)
2:如果主设备号没有确定 使用alloc_chrdev_region函数申请设备id
/**
* 需要在驱动的入口函数申请设备号
*@dev :保存申请到的设备号
*@baseminor :次设备号起始地址,可以申请一段连续的多个设备号,这些设备号的主设备号一样,但是次设备号不同,次设备号以 baseminor为起始地址地址开始递增。一般从0,也就是说次设备号从0开始。
*@count :要申请的设备号数量。
*@name :设备名字
*/
int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count, const char *name)
3:字符设备释放函数,无论是register_chrdev_region或者alloc_chrdev_region注册的字符设备,都用该函数进行释放
/**
* 设备号释放函数,在出口函数中调用,无
*@from :要释放的设备号。
*@count:表示从 from开始,要释放的设备号数量
*/
void unregister_chrdev_region(dev_t from, unsigned count)
注意:使用cat /proc/devices 命令查看当前系统已经使用的了设备号
1.3.3. 设备节点
1.3.3.1. 命令行手动创建设备节点
/dev/chrdevbase :设备节点名字
c :代表字符设备驱动
200 : 主设备号
0 : 次设备号
mknod /dev/chrdevbase c 200 0
1.3.3.2. 自动创建设备节点
在驱动入口函数中先创建类,然后在类下创建设备
/* 创建类,类名 xym_led_class*/
led_class = class_create(THIS_MODULE, "xym_led_class");
/* 类下创建设备,那么 /dev/xym_led 即是显示的设备节点*/
device_create(led_class, NULL, devid, NULL, "xym_led");
在出口函数就要设备类和设备节点
device_destroy(led_class, devid); // 摧毁类下的设备
class_destroy(led_class); // 摧毁类
1.3.3.3. 创建类和删除类函数原型
自动创建设备节点相关代码。首先要创建一个 class类, class是个结构体,定义在文件 include/linux/device.h里面。 class_create是类创建函数, class_create是个宏定义,内容如下:
/**
*
*@owner:THIS_MODULE
*@name:类名
*/
#define class_create(owner, name) \
({ \
static struct lock_class_key __key; \
__class_create(owner, name, &__key); \
})
struct class *__class_create(struct module *owner, const char *name, 8 struct lock_class_key *key)
/**
*
*@cls:指向要卸载的类指针
*/
void class_destroy(struct class *cls);
1.3.3.4. 创建设备
/**
*
*@class:指向要在哪个类下面创建设备的类指针
*@parent:父亲,一般为NULL
*@devt : 设备id
*@drvdata:设备可能会使用的一些数据
*@fmt :可变参数,设备名字,该名字会在/dev/目录下显示
*/
建好类以后还不能实现自动创建设备节点,我们还需要在这个类下创建一个设备。使用 device_create函数在类下面创建设备, device_create函 数原型如下:
struct device *device_create(struct class *class, struct device *parent, dev_t devt, void *drvdata, const char *fmt, ...)
在设备卸载的时候,即出口函数中调用摧毁函数 参数 classs是要删除的设备所处的类,参数 devt是要删除的设备号。
/**
*
*@class:指向要删除的设备所处的类
*@devt : 设备id
*/
void device_destroy(struct class *class, dev_t devt)
1.3.4. mmu地址映射
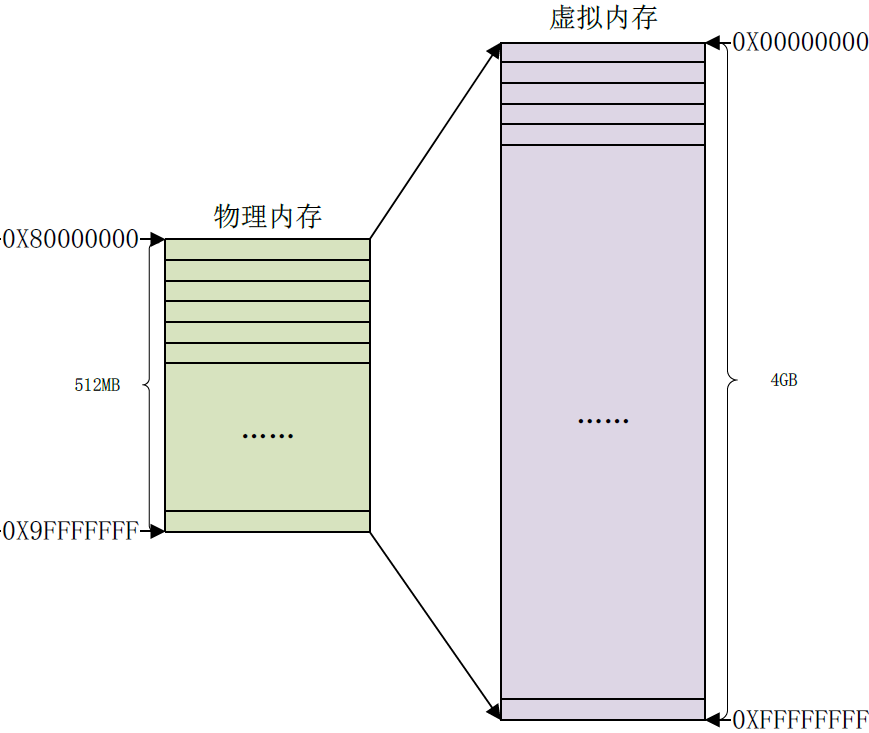
完成虚拟空间到物理空间的映射。
内存保护,设置存储器的访问权限,设置虚拟存储空间的缓冲特性。
1.3.4.1. ioremap
Linux内核启动的时候会初始化MMU,设置好内存映射,设置好以后CPU访问的都是虚
拟地址。当我们想访问物理地址的时候就必须做相应的转换ioremap函数。
ioremap函数用于获取指定物理地址空间对应的虚拟地址空间,定义在
arch/arm/include/asm/io.h文件中,定义如下:
/**
*@phys_addr :要映射给的物理起始地址。
*@*@size :要映射的内存空间大小。
mtype ioremap的类型,可以选择 MT_DEVICE、 MT_DEVICE_NONSHARED、MT_DEVICE_CACHED和 *@MT_DEVICE_WC ioremap函数选择 MT_DEVICE。
*返回值 : __iomem类型的指针,指向映射后的虚拟空间首地址。
*/
#define ioremap(cookie,size) __arm_ioremap((cookie), (size), MT_DEVICE)
void __iomem * __arm_ioremap(phys_addr_t phys_addr, size_t size, unsigned int mtype)
{
return arch_ioremap_caller(phys_addr, size, mtype, __builtin_return_address(0));
}
例如我们要访问GPIO1_IO03的寄存器,可以这样定义
#define SW_MUX_GPIO1_IO03_BASE (0X020E0068) // 查找手册确定要操作的寄存器物理地址
static void __iomem* SW_MUX_GPIO1_IO03;
SW_MUX_GPIO1_IO03 = ioremap(SW_MUX_GPIO1_IO03_BASE, 4);// 通过ioremap把物理地址转换为虚拟地址 SW_MUX_GPIO1_IO03 这样就可以用SW_MUX_GPIO1_IO03访问了
1.3.4.2. iounmap函数
卸载驱动的时候需要使用 iounmap函数释放掉 ioremap函数所做的映射, iounmap函数原 型如下:
函数原型 void iounmap (volatile void __iomem *addr)
iounmap(SW_MUX_GPIO1_IO03);
1.3.4.2.1. 内核空间的内存操作函数
使用 ioremap函数将寄存器的物理地址映射到虚拟地址以后,我们就可以直接通过指针访问这些地址,但是 Linux内核不建议这么做,而是推荐使用一组操作函数来对映射后的内存进行读写操作。
1.3.4.2.1.1. 读操作函数
u8 readb(const volatile void __iomem *addr)
u16 readw(const volatile void __iomem *addr)
u32 readl(const volatile void __iomem *addr)
readb、 readw和 readl这三个函数分别对应 8bit、 16bit和 32bit读操作,参数 addr就是要 读取写内存地址,返回值就是读取到的数据。
1.3.4.2.1.2. 写操作函数
写操作函数有如下几个:
void writeb(u8 value, volatile void __iomem *addr)
void writew(u16 value, volatile void __iomem *addr)
void writel(u32 value, volatile void __iomem *addr)
writeb、 writew和 writel这三个函数分别对应 8bit、 16bit和 32bit写操作,参数 value是要 写入的数值, addr是要写入的地址。
1.3.5. printf 和printk
printf运行在用户空间,printk运行在内核空间,可以根据日志级别对消息进行分类,一共有 8个消息级别, 这 8个消息级别定义在文件 include/linux/kern_levels.h里面,定 义如下:
#define KERN_SOH "\001"
#define KERN_EMERG KERN_SOH "0" /* 紧急事件,一般是内核崩溃 */
#define KERN_ALERT KERN_SOH "1" /* 必 须立即采取行动 */
#define KERN_CRIT KERN_SOH "2" /* 临界条件,比如严重的软件或硬件错误 */
#define KERN_ERR KERN_SOH "3" /* 错误状态,一般设备驱动程序中使用KERN_ERR报告硬件错误 */
#define KERN_WARNING KERN_SOH "4" /* 警告信息,不会对系统造成严重影响 */
#define KERN_NOTICE KERN_SOH "5" /* 有必要进行提示的一些信息 */
#define KERN_INFO KERN_SOH "6" /* 提示性的信息 */
#define KERN_DEBUG KERN_SOH "7" /* 调试信息 */ 一共定义了 8个级别,其中 0的优先级最高, 7的优先级最低。
如果要设置消息级别,参考如下示例:
printk(KERN_EMERG "gsmi: Log Shutdown Reason\n");
不显式的设置消息级别,那么 printk将会采用默认级别
MESSAGE_LOGLEVEL_DEFAULT默认为 4。
在 include/linux/printk.h中有个宏
#define CONSOLE_LOGLEVEL_DEFAULT 7
消息基本高于7的才会被显示出来
1.4. 总线设备驱动模型
1.4.1. 整体框架
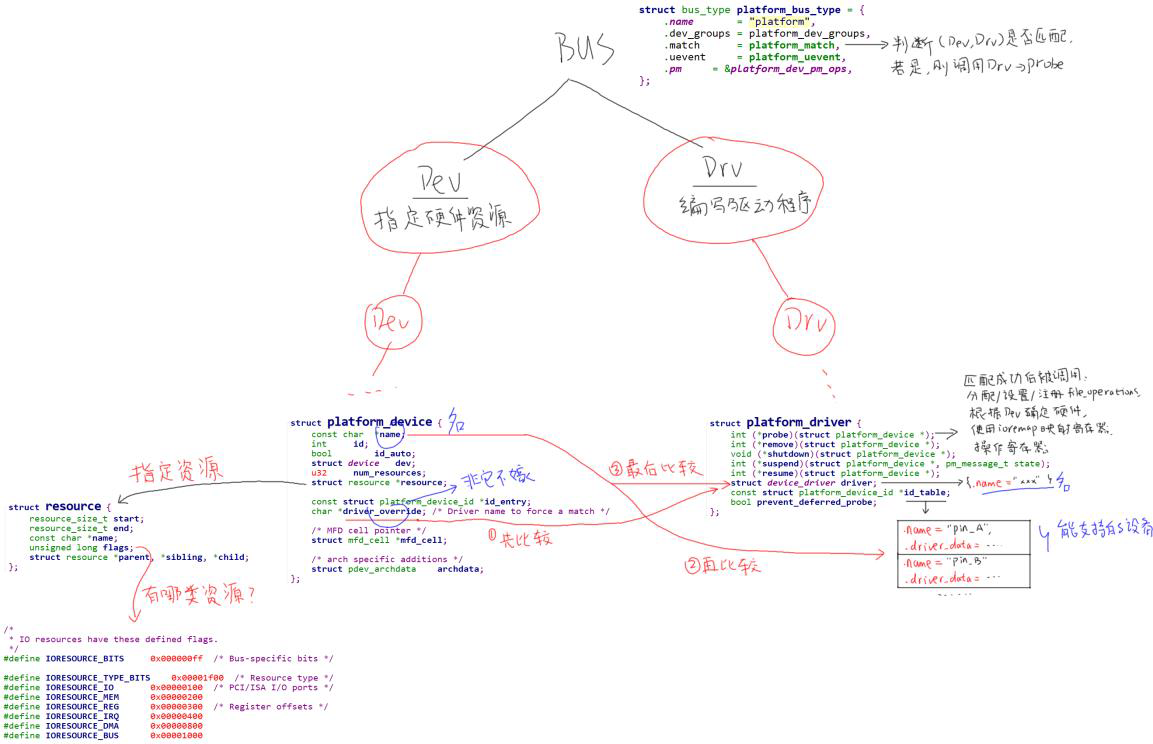
无论先注册平台设备还是平台驱动,程序都会去bus里面找对应的链表,根据匹配规则进行设备和驱动的匹配,当成功后就会调用驱动的probe函数,在probe函数中自己可以注册设备分配自己的file_operotions结构体,并完成硬件的初始化工作。
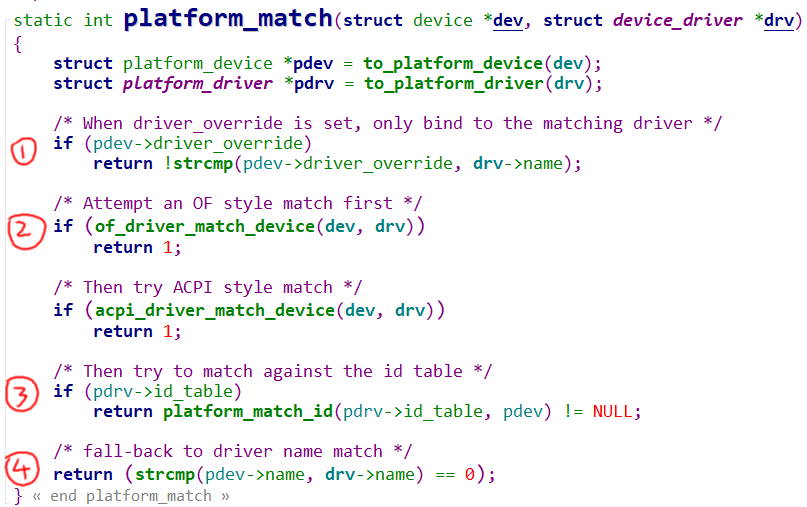
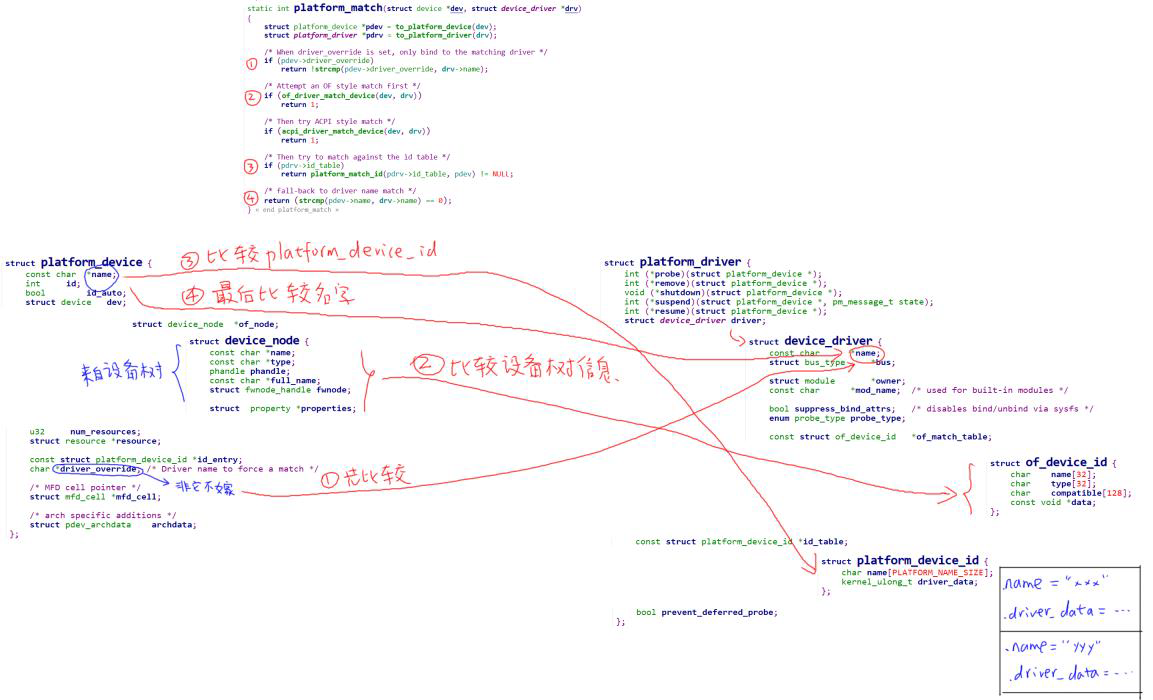
1.4.1.1. 匹配规则
比较
platform_device.driver_override和platform_driver.driver.name可以设置platform_device .driver_override,强制选择某个platform_driver。然后比较:
platform_ device.name和platform_driver.id_table[i].nameplatform_driver.id_table是struct platform_device_id类型的指针,表示该 drv 支持若干个 device ,它里面 列出了各个 device 的{ .name; //表示该 dv 支持的设备的名字 .driver_data; //提供给该 d evice 的私有数据 }
最后比较:
platform_device.name和platform_driver.driver.nameplatform_driver.id_table可能为空,这时可以根据platform_driver.driver.name来寻找同名的platform_device。
1.4.1.2. 平台设备注册函数调用关系
platform_device_register
platform_device_add
device_add
bus_add_device // 放入链表
bus_probe_device // probe 枚举设备, 即找到匹配的 dev, drv
device_initial_probe
__device_attach
bus_for_each_drv (...,(...,__device_attach_driver
__device_attach_driver
driver_match_device(drv, dev) // 是否匹配
driver_probe_device // 调用 d rv 的 p robe
1.4.1.3. 平台驱动注册函数调用关系
platform_driver_register
__platform_driver_register
driver_register
bus_add_driver // 放入链表
driver_attach(drv)
bus_for_each_dev(drv bus, NULL, drv, __driver_attach);
__driver_attach
driver_match_device(drv, dev) // 是否匹配
driver_probe_device // 调用 d rv 的 p robe
1.4.1.4. 常用函数
drivers/base/platform.c
设备相关
platform_device_register\platform_device_unregister
platform_add_devices// 注册多个 device
驱动相关
platform_driver_register\platform_driver_unregister
获取资源相关
返回该dev 某种类型(type)的资源中的第几个(num)资源
struct resource *platform_get_resource(struct platform_device *dev,
unsigned int type, unsigned int num)
eg:获取中断内存资源
platform_get_resource(dev, IORESOURCE_MEM, i)
返回该dev所用的第几个(num) 中断:
int platform_get_irq(struct platform_device *dev, unsigned int num)
通过名字返回该dev的某类型的资源
struct resource *platform_get_resource_byname(struct platform_device *dev,
unsigned int type,
const char *name)
通过名字返回该dev的中断号
int platform_get_irq_byname(struct platform_device *dev, const char *name)
1.5. 设备树
1.5.1. 设备树编译与反编译
/sys/firmware/devicetree目录下是以目录结构程现的 dtb 文件 , 根节点对应 base 目录 , 每一个节
点对应一个目录 , 每 一个属性对应一个文件 。这些属性的值如果是字符串,可以使用 cat 命令把它打印出来;对于数值,可以用 hexdump 把它打印出来。
# ls /sys/firmware
devicetree fdt
编译设备树
在内核根目录下
make dtbs V=1
内核目录下scripts/dtc/dtc 是设备树的编译工具,直接使用它的话,包含其他文件时不能使用#include ,而必须使用 incldue/。
编译、反编译的示例命令如下:
-I :指 定输入格式,-O :指定输出格式,-o :指定输出文件
./scripts/dtc/dtc I dts O dtb o tmp.dtb arch/arm/boot/dts/xxx.dts // 编译 dts 为 dtb
./scripts/dtc/dtc I dtb O dts o tmp.dts arch/arm/boot/dts/xxx.dtb // 反编译 dtb 为 dts
1.5.2. 更换开发板设备树文件
对于 野火 imx6ull pro
arch/arm/boot/dts/imx6ull_14x14_ebf.dtb # 编译出来的设备树文件位于内核源码路径下
更换这个文件
/boot/imx6ull_14x14_ebf.dtb # 开发板启动后设备树文件位于这个目录
对于 firefly rk3288
arch/arm/boot/dts/rk3288_firefly.dtb # 编译出来的设备树文件位于内核源码路径下
更换这个文件
/boot/rk3288_firefly.dtb # 开发板启动后设备树文件位于这个目录
还可以看到/sys/firmware/fdt 文件,它就是 dtb 格式的设备树文件,可以把它复制出来放到 ubuntu上,执行下面的命令反编译出来 -I dtb :输入格式是 dtb -O dts :输出 格式是 dts)
./scripts/dtc/dtc I dtb O dts ~/fdt o tmp.dts # ~/fdt是从开发板上拷贝到ubuntu下的~目录下
1.5.3. 内核对设备树的处理

dts在PC 机上被编译为 dtb 文件;
uboot 把 dtb 文件传给内核;
内核解析 dtb 文件,把每一个节点都转换为 device_node 结构体;
对于某些 device_node 结构体,会被转换 为 platform_device 结构体。
dtb 中每一个节点都被转换为 device_node 结构体。根节点被保存在全局变量of_root 中,从 of_root 开始可以访问到任意节点。
1.5.4. 设备树节点被转换为 platform_device规则
根节点下含有 compatile 属性的 子节点;
如果一个节点的compatile 属性 ,它的值是这 4 者之一
simple bus、simple、mfd、isa、arm,amb a bus,那么它的子结点如果包含 compatile 属性 也可以转换为 platform_device 。总线 I2C 、 SPI 节点下的子节点 不转换 为 p latform_device,某个总线下到子节点,应该交给对应的总线驱动程序来处理 , 它们不应该被转换为 platform_device 。
/{
/*
* mytest会被转换为 platform_device, 满足条件1
* 子节点 mytest@0 也会被转换,满足条件2
*/
mytest {
compatile = "mytest", "simple bus";
mytest@0 {
compatile = "mytest_0";
};
};
/*
* i2c会被转换为 platform_device, 满足条件1
* 子节点 at24c02 不会被转换,它被如何处理完全由父节点的platform_driver决定 , 一般是被创建为一 * 个 i2c_client
*/
i2c {
compatile = "samsung,i2c";
at24c02 {
compatile = "a t24c02";
};
};
/*
* spi 会被转换为 platform_device, 满足条件1
* 子节点 flash@0 不会被转换,它被如何处理完全由父节点的platform_driver决定 , 一般是被创建为一 * 个 spi_device
*/
spi {
compatile = "samsung,spi";
flash@0 {
compatible = "winbond,w25q32dw";
spi-max-frequency = <25000000>;
reg = <0>;
};
};
};
1.5.4.1. 使用设备树后的platform_device如何与 platform_driver的匹配过程
比较
platform_device. driver_override和platform_driver.driver.name比较:
platform_device.dev.of_node和platform_driver.driver.of_match_table由设备树节点转换得来的
platform_device.dev中,含有一个结构体:of_node。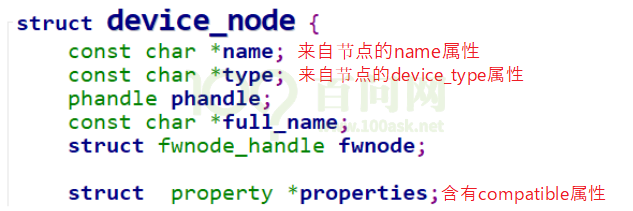
如果一个platform_driver支持设备树,它的
platform_driver.driver.of_match_table是一个数组,类型如下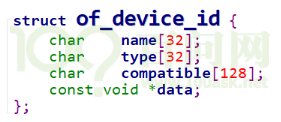
使用设备树信息来判断dev和drv是否配对时,
首先:如果of_match_table中含有compatible值,就跟dev的compatile属性比较,若一致则成功,否则返回失败;
其次:如果of_match_table中含有type值,就跟dev的device_type属性比较,若一致则成功,否则返回失败;
最后:如果of_match_table中含有name值,就跟dev的name属性比较,若一致则成功,否则返回失败。
而设备树中建议不再使用devcie_type和name属性,所以基本上只使用设备节点的compatible属性来寻找匹配的platform_driver。
比较
platform_device. name和platform_driver.id_table[i].name,id_table中可能有多项platform_driver.id_table是
platform_device_id指针,表示该drv支持若干个device,它里面列出了各个device的{.name, .driver_data},其中的“name”表示该drv支持的设备的名字,driver_data是些提供给该device的私有数据platform_driver.id_table可能为空,这时可以根据platform_driver.driver.name来寻找同名的platform_device。
1.5.5. 设备树常用函数
1.5.5.1. 常用头文件
1:处理DTB
of_fdt.h // dtb文件的相关操作函数, 我们一般用不到,
// 因为dtb文件在内核中已经被转换为device_node树(它更易于使用)
2:处理device_node
of.h // 提供设备树的一般处理函数,
// 比如 of_property_read_u32(读取某个属性的u32值),
// of_get_child_count(获取某个device_node的子节点数)
of_address.h // 地址相关的函数,
// 比如 of_get_address(获得reg属性中的addr, size值)
// of_match_device (从matches数组中取出与当前设备最匹配的一项)
of_dma.h // 设备树中DMA相关属性的函数
of_gpio.h // GPIO相关的函数
of_graph.h // GPU相关驱动中用到的函数, 从设备树中获得GPU信息
of_iommu.h // 很少用到
of_irq.h // 中断相关的函数
of_mdio.h // MDIO (Ethernet PHY) API
of_net.h // OF helpers for network devices.
of_pci.h // PCI相关函数
of_pdt.h // 很少用到
of_reserved_mem.h // reserved_mem的相关函数
处理 platform_device
of_platform.h // 把device_node转换为platform_device时用到的函数,
// 比如of_device_alloc(根据device_node分配设置platform_device),
// of_find_device_by_node (根据device_node查找到platform_device),
// of_platform_bus_probe (处理device_node及它的子节点)
of_device.h // 设备相关的函数, 比如 of_match_device
1.5.5.2. 常用函数
1.5.5.2.1. of_find_device_by_node
函数原型为:
extern struct platform_device *of_find_device_by_node(struct device_node *np);
设备树中的每一个节点,在内核里都有一个device_node;你可以使用device_node去找到对应的platform_device。
1.5.5.2.2. platform_get_resource
这个函数跟设备树没什么关系,但是设备树中的节点被转换为platform_device后,设备树中的reg属性、interrupts属性也会被转换为“resource”。这时,你可以使用这个函数取出这些资源。 函数原型为:
/**
* platform_get_resource - get a resource for a device
* @dev: platform device
* @type: resource type // 取哪类资源?IORESOURCE_MEM、IORESOURCE_REG
* // IORESOURCE_IRQ等
* @num: resource index // 这类资源中的哪一个?
*/
struct resource *platform_get_resource(struct platform_device *dev,
unsigned int type, unsigned int num);
对于设备树节点中的reg属性,它属性IORESOURCE_MEM类型的资源;
对于设备树节点中的interrupts属性,它属性IORESOURCE_IRQ类型的资源。
1.5.5.2.3. 有些节点不会生成platform_device,怎么访问它们
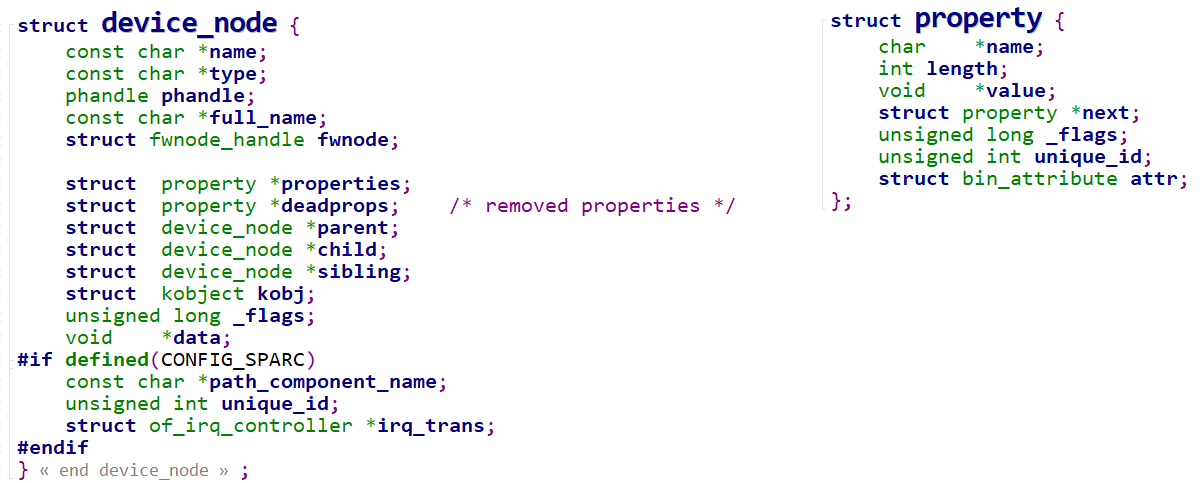
内核会把dtb文件解析出一系列的device_node结构体,我们可以直接访问这些device_node。内核源码incldue/linux/of.h中声明了device_node和属性property的操作函数,device_node和property的结构体定义如下:
1.5.5.2.4. 找到节点
of_find_node_by根据路径找到节点,比如“/”就对应根节点,“/memory”对应memory节点。 函数原型:static inline struct device_node *of_find_node_by_path(const char *path);
of_find_node_by_name根据名字找到节点,节点如果定义了name属性,那我们可以根据名字找到它。 函数原型:extern struct device_node *of_find_node_by_name(struct device_node *from, const char *name);
参数from表示从哪一个节点开始寻找,传入NULL表示从根节点开始寻找。 但是在设备树的官方规范中不建议使用“name”属性,所以这函数也不建议使用。
of_find_node_by_type根据类型找到节点,节点如果定义了device_type属性,那我们可以根据类型找到它。 函数原型:extern struct device_node *of_find_node_by_type(struct device_node *from, const char *type);
参数from表示从哪一个节点开始寻找,传入NULL表示从根节点开始寻找。 但是在设备树的官方规范中不建议使用“device_type”属性,所以这函数也不建议使用。
of_find_compatible_node根据compatible找到节点,节点如果定义了compatible属性,那我们可以根据compatible属性找到它。 函数原型:extern struct device_node *of_find_compatible_node(struct device_node *from, const char *type, const char *compat);
参数from表示从哪一个节点开始寻找,传入NULL表示从根节点开始寻找。 参数compat是一个字符串,用来指定compatible属性的值; 参数type是一个字符串,用来指定device_type属性的值,可以传入NULL。
of_find_node_by_phandle根据phandle找到节点。dts文件被编译为dtb文件时,每一个节点都有一个数字ID,这些数字ID彼此不同。可以使用数字ID来找到device_node。这些数字ID就是phandle。函数原型:
extern struct device_node *of_find_node_by_phandle(phandle handle);
参数from表示从哪一个节点开始寻找,传入NULL表示从根节点开始寻找。
of_get_parent找到device_node的父节点。函数原型
extern struct device_node *of_get_parent(const struct device_node *node);
参数from表示从哪一个节点开始寻找,传入NULL表示从根节点开始寻找。
of_get_next_parent这个函数名比较奇怪,怎么可能有
next parent?它实际上也是找到device_node的父节点,跟of_get_parent的返回结果是一样的。 差别在于它多调用下列函数,把node节点的引用计数减少了1。这意味着调用of_get_next_parent之后,你不再需要调用of_node_put释放node节点。
of_node_put(node);
函数原型:
extern struct device_node *of_get_next_parent(struct device_node *node);
参数from表示从哪一个节点开始寻找,传入NULL表示从根节点开始寻找。
of_get_next_child取出下一个子节点。 函数原型:
extern struct device_node *of_get_next_child(const struct device_node *node, struct device_node *prev);
参数node表示父节点; prev表示上一个子节点,设为NULL时表示想找到第1个子节点。
不断调用of_get_next_child时,不断更新pre参数,就可以得到所有的子节点。
of_get_next_available_child取出下一个“可用”的子节点,有些节点的status是“disabled”,那就会跳过这些节点。函数原型:
struct device_node *of_get_next_available_child(const struct device_node *node, struct device_node *prev);
参数node表示父节点; prev表示上一个子节点,设为NULL时表示想找到第1个子节点。
of_get_child_by_name根据名字取出子节点。 函数原型:extern struct device_node *of_get_child_by_name(const struct device_node *node, const char *name);
参数node表示父节点; name表示子节点的名字。
1.5.5.2.5. 找到属性
内核源码incldue/linux/of.h中声明了device_node的操作函数,当然也包括属性的操作函数。
of_find_property
找到节点中的属性。
函数原型:
extern struct property *of_find_property(const struct device_node *np,
const char *name,
int *lenp);
参数np表示节点,我们要在这个节点中找到名为name的属性。 lenp用来保存这个属性的长度,即它的值的长度。
在设备树中,节点大概是这样:
xxx_node {
xxx_pp_name = “hello”;
};
上述节点中,“xxx_pp_name”就是属性的名字,值的长度是6。
1.5.5.2.6. 获取属性的值
of_get_property根据名字找到节点的属性,并且返回它的值。 函数原型:
/* * Find a property with a given name for a given node * and return the value. */ const void *of_get_property(const struct device_node *np, const char *name, int *lenp)
参数np表示节点,我们要在这个节点中找到名为name的属性,然后返回它的值。 lenp用来保存这个属性的长度,即它的值的长度。
of_property_count_elems_of_size根据名字找到节点的属性,确定它的值有多少个元素(elem)。 函数原型:
/* of_property_count_elems_of_size - Count the number of elements in a property * * @np: device node from which the property value is to be read. * @propname: name of the property to be searched. * @elem_size: size of the individual element * * Search for a property in a device node and count the number of elements of * size elem_size in it. Returns number of elements on sucess, -EINVAL if the * property does not exist or its length does not match a multiple of elem_size * and -ENODATA if the property does not have a value. */ int of_property_count_elems_of_size(const struct device_node *np, const char *propname, int elem_size)
参数np表示节点,我们要在这个节点中找到名为propname的属性,然后返回下列结果:
return prop->length / elem_size;
在设备树中,节点大概是这样:
xxx_node { xxx_pp_name = <0x50000000 1024> <0x60000000 2048>; };
调用of_property_count_elems_of_size(np, “xxx_pp_name”, 8)时,返回值是2; 调用of_property_count_elems_of_size(np, “xxx_pp_name”, 4)时,返回值是4。
读整数u32/u64
函数原型为:
static inline int of_property_read_u32(const struct device_node *np, const char *propname, u32 *out_value); extern int of_property_read_u64(const struct device_node *np, const char *propname, u64 *out_value);
在设备树中,节点大概是这样:
xxx_node { name1 = <0x50000000>; name2 = <0x50000000 0x60000000>; };
调用of_property_read_u32 (np, “name1”, &val)时,val将得到值0x50000000; 调用of_property_read_u64 (np, “name2”, &val)时,val将得到值0x0x6000000050000000。
读某个整数u32/u64
函数原型为:
extern int of_property_read_u32_index(const struct device_node *np, const char *propname, u32 index, u32 *out_value);
在设备树中,节点大概是这样:
xxx_node { name2 = <0x50000000 0x60000000>; };
调用of_property_read_u32 (np, “name2”, 1, &val)时,val将得到值0x0x60000000。
读数组
函数原型为:
int of_property_read_variable_u8_array(const struct device_node *np, const char *propname, u8 *out_values, size_t sz_min, size_t sz_max); int of_property_read_variable_u16_array(const struct device_node *np, const char *propname, u16 *out_values, size_t sz_min, size_t sz_max); int of_property_read_variable_u32_array(const struct device_node *np, const char *propname, u32 *out_values, size_t sz_min, size_t sz_max); int of_property_read_variable_u64_array(const struct device_node *np, const char *propname, u64 *out_values, size_t sz_min, size_t sz_max);
在设备树中,节点大概是这样:
xxx_node { name2 = <0x50000012 0x60000034>; };
上述例子中属性name2的值,长度为8。
调用of_property_read_variable_u8_array (np, “name2”, out_values, 1, 10)时,out_values中将会保存这8个字节: 0x12,0x00,0x00,0x50,0x34,0x00,0x00,0x60。 调用of_property_read_variable_u16_array (np, “name2”, out_values, 1, 10)时,out_values中将会保存这4个16位数值: 0x0012, 0x5000,0x0034,0x6000。
总之,这些函数要么能取到全部的数值,要么一个数值都取不到; 如果值的长度在sz_min和sz_max之间,就返回全部的数值;否则一个数值都不返回。
读字符串 函数原型为:
int of_property_read_string(const struct device_node *np, const char *propname, const char **out_string);
返回节点np的属性(名为propname)的值,(*out_string)指向这个值,把它当作字符串。
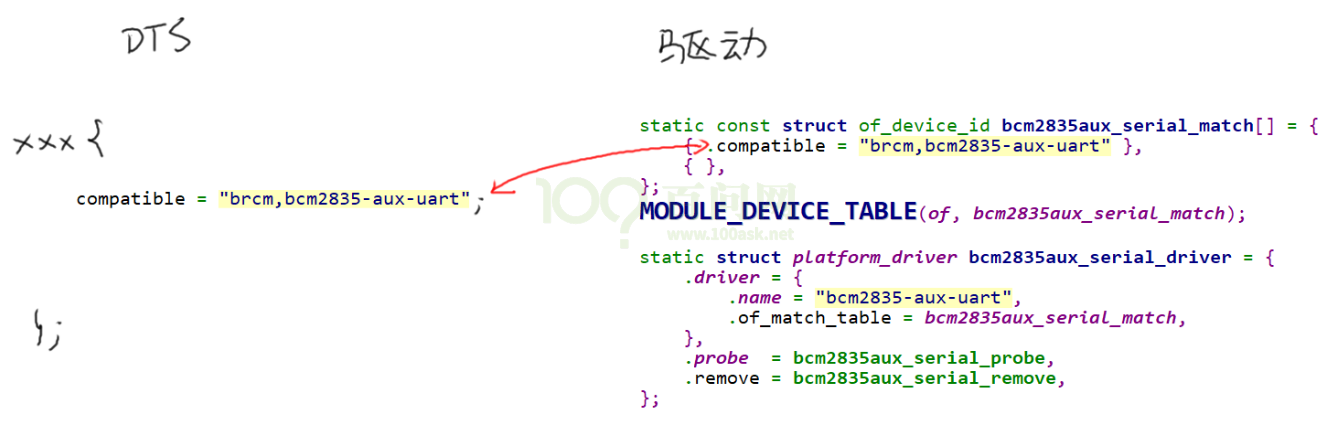
1.5.6. 编写设备树驱动程序
实际工作中工作中,驱动要求设备树节点提供什么,我们就得按这要求去编写设备树。但是,匹配过程所要求的东西是固定的:
设备树要有compatible属性,它的值是一个字符串
platform_driver中要有of_match_table,其中一项的.compatible成员设置为一个字符串
上述2个字符串要一致。
如下图所示:
1.6. pinctrl和GPIO子系统
1.6.1. pinctrl子系统
管理gpio的复用功能
管理gpio的电气特性(上下拉,驱动能力等)
iomuxc: iomuxc@020e0000 {
compatible = "fsl,imx6ul-iomuxc";
……
pinctrl_led{
fsl,pins = <
MX6ULL_PAD_SNVS_TAMPER3__GPIO5_IO03 0x1b0b0
>;
……
};
在arch/arm/boot/dts/imx6ull-pinfunc-snvs.h 里面有宏定义定义
#define MX6ULL_PAD_SNVS_TAMPER3__GPIO5_IO03 0x0014 0x0058 0x0000 0x5 0x0
后面四个值分别代表的意思如下:
0x0014:mux_reg 复用寄存器偏移地址 基地址通过父节点iomuxc找到 可以看出MX6ULL_PAD_SNVS_TAMPER3的mux_reg地址就是020e0000+0x0014 查阅手册就可以看出是正确的
0x0058:conf_reg 配置寄存器偏移地址
0x0000:input_reg 输入寄存器偏移地址 (不是每个io都有,这里就没有所以0x0000无效的值)
0x5 :mux_mode 配置mux_reg寄存器的值,即选择了ALT5 复用为GPIO
0x0 :input_val 配置input_reg的值,这里无效
而pinctrl_led里面的0x1b0b0 就是设置conf_reg寄存器的值,用来设置电器属性(上下拉等等)
所以通过 pinctrl_led描述,就可以确定这个IO功能。
根据iomuxc的属性compatible = "fsl,imx6ul-iomuxc"可以确定其驱动程序在
drivers/pinctrl/freescale/pinctrl-imx6ul.c文件中,这个即是fsl 官方为linux适配的pinctrl子系统的驱动程序
1.6.2. gpio子系统
在arch/arm/boot/dts/imx6ull.dtsi文件中定义各gpio控制器的属性
gpio5: gpio@020ac000 {
// 可以找到fsl官方为imx适配的linux的gpio子系统的源代码驱动文件 drivers/gpio/gpio-mxc.c
compatible = "fsl,imx6ul-gpio", "fsl,imx35-gpio";
reg = <0x020ac000 0x4000>; // GPIO5寄存器的基地址(GPIO5_DR GPIO5_GDIR……)
interrupts = <GIC_SPI 74 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 75 IRQ_TYPE_LEVEL_HIGH>;
gpio-controller; // 表示 gpio5节点是个 GPIO控制器。
/* 有两个cells 第一个是GPIO编号,例如&gpio5 3
* 第二个指GPIO的电平,0(GPIO_ACTIVE_HIGH)高电平有效 1(GPIO_ACTIVE_LOW)低电平有效。
*/
#gpio-cells = <2>;
interrupt-controller;
#interrupt-cells = <2>;
};
那么我们在下面需要引用到gpio节点的时候如下
leds {
compatible = "xym-led";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_led>;
led0: cpu {
gpios = <&gpio5 3 GPIO_ACTIVE_LOW>; // 正如这句,说明要用GPIO5_03 默认低电平有效
status = "okay";
};
};
1.6.2.1. 有关gpio子系统的API函数接口
//1: 用于申请一个 GPIO管脚,在使用一个GPIO之前一定要申请 label是给GPIO设置个名字 返回0代表成功
int gpio_request(unsigned gpio, const char *label)
//2:释放
void gpio_free(unsigned gpio)
//3: 设置为输入 返回0代表成功
int gpio_direction_input(unsigned gpio)
//4: 设置为输出,默认输出值为value 返回0代表成功 c
int gpio_direction_output(unsigned gpio, int value)
//5: 获取gpio的值,负值失败
#define gpio_get_value __gpio_get_value
int __gpio_get_value(unsigned gpio)
//6: 设置gpio的值, 为value
#define gpio_set_value __gpio_set_value
void __gpio_set_value(unsigned gpio, int value)
1.6.2.2. 与 gpio相关的 OF函数
int of_gpio_named_count(struct device_node *np, const char *propname)
获取设备树某个属性里面定义了几个 GPIO信息,要注意的是空的 GPIO信息也会被统计到,比如下面的代码会得到的返回值是 4
gpios = <0
&gpio1 1 2
0
&gpio2 3 4>;
int of_gpio_count(struct device_node *np)
和of_gpio_named_count函数一样,但是不同的地方在于,此函数统计的是“gpios”这个属
性的GPIO数量,而 of_gpio_named_count函数可以统计任意属性的 GPIO信息,
int of_get_named_gpio(struct device_node *np, const char *propname, int index)
此函数获取GPIO编号,
np:设备节点。
propname:包含要获 取 GPIO信息的属性名。
index GPIO索引,因为一个属性里面可能包含多个 GPIO,此参数指定要获取哪个 GPIO的编号,如果只有一个 GPIO信息的话此参数为 0。
返回值: 正值,获取到的 GPIO编号;负值,失败。
1.7. 并发与竞争
1.7.1. 原子操作
原子操作只能对整形变量或者位进行保护
1.7.1.1. 原子整形操作
include/linux/types.h
如果使用 32位的 SOC
typedef struct {
int counter;
} atomic_t;
如果使用 64位的 SOC
typedef struct {
long long counter;
} atomic64_t;
下面所有介绍都基于32位系统说明
使用示例
atomic_t a; /*定义a */
atomic_t v = ATOMIC_INIT(0); /* 定义并初始化原子变零v=0 */
atomic_set(10); /* 设置v=10 */
atomic_read(&v); /* 读取v的值,肯定是10 */
atomic_inc(&v); /* v的值加1,v=11 */
基本API
| 函数 | 功能 |
|---|---|
| ATOMIC_INIT(int i) | 定义原子变量的时候对其初始化 |
| int atomic_read(atomic_t *v) | 读取v的值,并且返回 |
| void atomic_set(atomic_t *v, int i) | 向v写入 i值 |
| void atomic_add(int i, atomic_t *v) | 给v加上 i值 |
| void atomic_sub(int i, atomic_t *v) | 从v减去 i值 |
| void atomic_inc(atomic_t *v) | 给v加 1,也就是自增 |
| void atomic_dec(atomic_t *v) | 从v减 1,也就是自减 |
| int atomic_dec_return(atomic_t *v) | 从v减 1,并且返回 v的值 |
| int atomic_inc_return(atomic_t *v) | 给v加 1,并且返回 v的值 |
| int atomic_sub_and_test(int i, atomic_t *v) | 从v减 i,如果结果为 0就返回真,否则返回假 |
| int atomic_dec_and_test(atomic_t *v) | 从v减 1,如果结果为 0就返回真,否则返回假 |
| int atomic_inc_and_test(atomic_t *v) | 给v加 1,如果结果为 0就返回真,否则返回假 |
| int atomic_add_negative(int i, atomic_t *v) | 给v加 i,如果结果为负就返回真,否则返回假 |
1.7.1.2. 原子位操作
基本API
| 函数 | 功能 |
|---|---|
| void set_bit(int nr, void *p) | 将p地址的第 nr位置 1。 |
| void clear_bit(int nr,void *p) | 将p地址的第 nr位清零。 |
| void change_bit(int nr, void *p) | 将p地址的第 nr位进行翻转。 |
| int test_bit(int nr, void *p) | 获取p地址的第 nr位的值。 |
| int test_and_set_bit(int nr, void *p) | 将p地址的第 nr位置 1,并且返回 nr位原来的值。 |
| int test_and_clear_bit(int nr, void *p) | 将p地址的第 nr位清零,并且返回 nr位原来的值。 |
| int test_and_change_bit(int nr, void *p) | 将p地址的第 nr位翻转,并且返回 nr位原来的值。 |
1.7.2. 自旋锁
对于自旋锁而言,如果自旋锁正在被线程 A持有,线程 B想要获取自旋锁,那么线程 B就会处于忙循环-旋转-等待状态, 线程B不会进入休眠状态或者说去做其他的处理,而是会一直傻傻的在那里“转圈圈”的等待线程A释放锁
缺点:等待自旋锁的线程会一直处于自旋状态,这样会浪费处理器时间,降低系统性能,所以自旋锁 的持有时间不能太长。自旋锁适用于短时期的轻量级加锁,如果遇到需要长时间持有锁的场景那就需要换其他的方法了,
注意事项:自旋锁加锁后。不要调用引起系统睡眠和阻塞的API的函数,否则会可能导致锁死现象 Linux关于自旋锁的结构体定义如下
typedef struct spinlock {
union {
struct raw_spinlock rlock;
#ifdef CONFIG_DEBUG_LOCK_ALLOC
# define LOCK_PADSIZE (offsetof(struct raw_spinlock, dep_map))
struct {
u8 __padding[LOCK_PADSIZE];
struct lockdep_map dep_map;
};
#endif
};
} spinlock_t;
自旋锁API 函数 | 函数 | 功能 | | ———————————— | ———————————————————— | | DEFINE_SPINLOCK(spinlock_t lock) | 定义并初始化一个自旋变量。 | | int spin_lock_init(spinlock_t *lock) | 初始化自旋锁。 | | void spin_lock(spinlock_t *lock) | 获取指定的自旋锁,也叫做加锁。 | | void spin_unlock(spinlock_t *lock) | 释放指定的自旋锁。 | | int spin_trylock(spinlock_t *lock) | 尝试获取指定的自旋锁,如果没有获取到就立即返回0,不在自旋等待 | | int spin_is_locked(spinlock_t *lock) | 检查指定的自旋锁是否被获取,如果没有被获取就返回非0,否则返回0 |
和中断有关的自旋锁
| 函数 | 功能 |
|---|---|
| void spin_lock_irq(spinlock_t *lock) | 禁止本地中断并获取自旋锁 |
| void spin_unlock_irq(spinlock_t *lock) | 激活本地中断,并释放自旋锁 |
| void spin_lock_irqsave(spinlock_t *lock, unsigned long flags) | 保存中断状态,禁止本地中断,并获取自旋锁。 |
| void spin_unlock_irqrestore(spinlock_t *lock, unsigned long flags) | 将中断状态恢复到以前的状态,并且激活本地中断,释放自旋锁 |
使用场景:
一般在线程中使用 spin_lock_irqsave/ spin_unlock_irqrestore, 在中断中使用 spin_lock/spin_unlock 应用举例
DEFINE_SPINLOCK(lock) /* 定义并初始化一个锁 */
/* 线程A */
void functionA ()
{
unsigned long flags; /* 中断状态 */
spin_lock_irqsave(&lock, flags) /* 获取锁 */
/* 临界区 */
spin_unlock_irqrestore(&lock, flags) /* 释放锁 */
}
/* 中断服务函数 */
void irq()
{
spin_lock(&lock) /* 获取锁 */
/* 临界区 */
spin_unlock(&lock) /* 释放锁 */
}
下半部 (BH)也会竞争共享资源,有些资料也会将下半部叫做底半部。如果要在下半部里面使用自旋锁, API函数:
| 函数 | 功能 |
|---|---|
| void spin_lock_bh(spinlock_t *lock) | 关闭下半部,并获取自旋锁。 |
| void spin_unlock_bh(spinlock_t *lock) | 打开下半部,并释放自旋锁 |
1.7.3. 读写自旋锁
在自旋锁的基础上衍生而来 特点:允许读并发
typedef struct {
arch_rwlock_t raw_lock;
} rwlock_t;
读写锁API
创建和初始化
| 函数 | 功能 |
|---|---|
| DEFINE_RWLOCK(rwlock_t lock) | 定义并初始化读写锁 |
| void rwlock_init(rwlock_t *lock) | 初始化读写锁 |
读锁
| 函数 | 功能 |
|---|---|
| void read_lock(rwlock_t *lock) | 获取读锁 |
| void read_unlock(rwlock_t *lock) | 释放读锁 |
| void read_lock_irq(rwlock_t *lock) | 禁止本地中断,并且获取读锁 |
| void read_unlock_irq(rwlock_t *lock) | 打开本地中断,并且释放读锁 |
| void read_lock_irqsave(rwlock_t *lock,unsigned long flags) | 保存中断状态,禁止本地中断,并获取读锁 |
| void read_unlock_irqrestore(rwlock_t *lock,unsigned long flags) | 将中断状态恢复到以前的状态,并且激活本地中断,释放读 |
| void read_lock_bh(rwlock_t *lock) | 关闭下半部,并获取读锁 |
| void read_unlock_bh(rwlock_t *lock) | 打开下半部,并释放读锁 |
写锁
| 函数 | 功能 |
|---|---|
| void write_lock(rwlock_t *lock) | 获取写 锁 |
| void write_unlock(rwlock_t *lock) | 释放写 锁 |
| void write_lock_irq(rwlock_t *lock) | 禁止本地中断,并且获取写 锁 |
| void write_unlock_irq(rwlock_t *lock) | 打开本地中断,并且释放写 锁 |
| void write_lock_irqsave(rwlock_t *lock,unsigned long flags) | 保存中断状态,禁止本地中断,并获取写 锁 |
| void write_unlock_irqrestore(rwlock_t *lock,unsigned long flags) | 将中断状态恢复到以前的状态,并且激活本地中断,释放读锁 |
| void write_lock_bh(rwlock_t *lock) | 关闭下半部,并获取读锁 |
| void write_unlock_bh(rwlock_t *lock) | 打开下半部,并释放读锁。 |
1.7.4. 顺序锁
在读写锁的基础上衍生而来 允许读写并发,但是在读操作的时候同时进行了写操作,最好重新读取,保证读取的数据正确 最好重新进行读取,保证数据完整性。顺序锁保护的资源不能是指针,因为如果在写操作的时 候可能会导致指针无效,而这个时候恰巧有读操作访问指针的话就可能导致意外发生,比如读 取野指针导致系统崩溃。 Linux 关于顺序锁的定义
typedef struct {
struct seqcount seqcount;
spinlock_t lock;
} seqlock_t;
顺序锁定义并初始化 | 函数 | 功能 | | ——————————- | —————— | | DEFINE_SEQLOCK(seqlock_t sl) | 定义并初始化顺序锁 | | void seqlock_ini seqlock_t *sl) | 初始化顺序锁 |
顺序锁写操作 | 函数 | 功能 | | ———————————————————— | ————————————————– | | void write_seqlock(seqlock_t *sl) | 获取写顺序锁。 | | void write_sequnlock(seqlock_t *sl) | 释放写顺序锁。 | | void write_seqlock_irq(seqlock_t *sl) | 禁止本地中断,并且获取写顺序锁 | | void write_sequnlock_irq(seqlock_t *sl) | 打开本地中断,并且释放写顺序锁。 | | void write_seqlock_irqsave(seqlock_t *sl,unsigned long flags) | 保存中断状态,禁止本地中断,并获取写顺序锁。 | | void write_sequnlock_irqrestore(seqlock_t *sl,unsigned long flags) | 恢复以前的中断状态,并激活本地中断,释放写顺序锁。 | | void write_seqlock_bh(seqlock_t *sl) | 关闭下半部,并获取写读锁。 | | void write_sequnlock_bh(seqlock_t *sl) | 打开下半部,并释放写读锁。 |
顺序锁读操作 | 函数 | 功能 | | ———————————————————- | ———————————————————— | | unsigned read_seqbegin(const seqlock_t *sl) | 读单元访问共享资源的时候调用此函数,此函数会返回顺序锁的顺序号。 | | unsigned read_seqretry(const seqlock_t *sl,unsigned start) | 读结束以后调用此函数检查在读的过程中有没有对资源进行写操作,如果有的话就要重读 |
自旋锁使用注意事项
因为在等待自旋锁的时候处于“自旋”状态,因此锁的持有时间不能太长,一定要 短,否则的话会降低系统性能。如果临界区比较大,运行时间比较长的话要选择其他的并发处 理方式,比如稍后要讲的信号量和互斥体。
自旋锁保护的临界区内不能调用任何可能导致线程休眠的 API函数,否则的话可能 导致 死锁。
不能递归申请自旋锁,因为一旦通过递归的方式申请一个你正在持有的锁,那么你就 必须“自旋”, 等待锁被释放,然而你正处于“自旋”状态,根本没法释放锁。结果就是自己 把自己锁死了!
在编写驱动程序的时候我们必须考虑到驱动的可移植性,因此不管你用的是单核的还 是多核的 SOC,都将其当做多核 SOC来编写驱动程序。
1.7.5. 信号量
相比于自旋锁,信号量可以使线程进入休眠状态,但是,信号量的开销要比自旋锁大,因为信号量使 线程进入休眠状态 以后会切换线程,切换线程就会有开销。总结一下信号量的特点:
因为信号量可以使等待资源线程进入休眠状态,因此适用于那些占用资源比较久的场合;
因此信号量不能用于中断中,因为信号量会引起休眠,中断不能休眠;
如果共享资源的持有时间比较短,那就不适合使用信号量了,因为频繁的休眠、切换线程引起的开销要远大于信号量带来的那点优势。
数型信号量,计数型信号量不能用于互斥访问,因为它允许多个线程同时访问共享资源。线程申请一次信号量就会自减一次 知道为0;如果要互斥的访问共享资源那么信号量的值就不能大于1,此时的信号量就是一个二值信号量。 Linux内核使用 semaphore结构体表示信号量,结构体内容如下所示:
struct semaphore {
raw_spinlock_t lock;
unsigned int count;
struct list_head wait_list;
};
信号量的API函数 | 函数 | 功能 | | ———————————————- | ———————————————————— | | DEFINE_SEAMPHORE(name) | 定义一个信号量,并且设置信号量的值为 | | void sema_init(struct semaphore *sem, int val) | 初始化信号量sem,设置信号量值为 val。 | | void down(struct semaphore *sem) | 获取信号量,因为会导致休眠,因此不能在中断中使用。 | | int down_trylock(struct semaphore *sem); | 尝试获取信号量,如果能获取到信号量就获取,并且返回 0。如果不能就返回非 0,并且不会进入休眠。 | | int down_interruptible(struct semaphore *sem) | 获取信号量,和down类似,只是使用 down进入休眠状态的线程不能被信号打断。而使用此函数进入休眠以后是可以被信号打断的。 | | void up(struct semaphore *sem) | 释放信号量 |
应用举例
struct semaphore sem; /* 定义信号量 */
sema_init(&sem, 1); /* 初始化信号量 */
down(&sem); /* 申请信号量 */
/* 临界区 */
up(&sem); /* 释放信号量 */
1.7.6. 互斥体
将信号量的值设置为1就可以使用信号量进行互斥访问了,虽然可以通过信号量实现互斥,但是 Linux提供了一个比信号量更专业的机制来进行 互斥,它就是互斥体 mutex。互斥访问表示一次只有一个线程可以访问共享资源,不能递归申 请互斥体。 在我们编写 Linux驱动的时候遇到需要互斥访问的地方建议使用 mutex LINUX关于互斥体的定义如下
struct mutex {
atomic_t count; /* 1: unlocked, 0: locked, negative: locked, possible waiters */
spinlock_t wait_lock;
};
在使用 mutex之前要先定义一个 mutex变量。在使用 mutex的时候要注 意如下几点:
mutex可以导致休眠,因此不能在中断中使用 mutex,中断中只能使用自旋锁。
和信号量一样,mutex保护的临界区可以调用引起阻塞的 API函数。
因为一次只有一个线程可以持有mutex,因此,必须由 mutex的持有者释放 mutex。并且 mutex不能递归上锁和解锁。
关于互斥体的API函数 | 函数 | 功能 | | ———————————————— | —————————————————– | | DEFINE_MUTEX(name) | 定义并初始化一个mutex变量。 | | void mutex_init(mutex *lock) | 初始化mutex。 | | void mutex_lock(struct mutex *lock) | 获取mutex,也就是给 mutex上锁。如果获取不到就进休眠。 | | void mutex_unlock(struct mutex *lock) | 释放mutex,也就给 mutex解锁。 | | int mutex_trylock(struct mutex *lock) | 尝试获取mutex,如果成功就返回 1,如果失败就返回 0。 | | int mutex_is_locked(struct mutex *lock) | 判断 mutex是否被获取,如果是的话就返回1,否则返回 0。 | | int mutex_lock_interruptible(struct mutex *lock) | 使用此函数获取信号量失败进入休眠以后可以被信号打断。 |
应用举例
struct mutex lock; /* 定义一个互斥体 */
mutex_init(&lock); /* 初始化互斥体 */
mutex_lock(&lock); /* 上锁 */
/* 临界区 */
mutex_unlock(&lock); /* 解锁 */
1.8. Linux内核定时器
1.8.1. 简介
我们在编译 Linux内核的时候可以通过图形化界面设置系统节拍率,按照如下路径打开配置界面:
-> Kernel Features -> Timer frequency (
可以看出,可选的系统节拍率为 100Hz、 200Hz、 250Hz、 300Hz、 500Hz和1000Hz,默认情况下选择 100Hz 编写 Linux驱动的时候会常常用到 HZ,HZ表示一秒的节拍数,也就是频率。即上面的这些频率值 定义在include/asm-generic/param.h里面
# undef HZ
# define HZ CONFIG_HZ // 这里定义 CONFIG_HZ即是通过配置界面生成在.config里面的值
# define USER_HZ 100
# define CLOCKS_PER_SEC (USER_HZ)
Linux内核使用全局变量 jiffies来记录系统从启动以来的系统节拍数,系统启动的时候会
将 jiffies初始化为 0 jiffies定义在文件 include/linux/jiffies.h中,定义如下:
extern u64 __jiffy_data jiffies_64;
extern unsigned long volatile __jiffy_data jiffies;
jiffies_64 和jiffies一个是64位的一个是32位的,jiffies其实就是jiffies_64的低32位而已
unkown 通常为jiffies,known 通常是需要对比的值。 | 函数 | 功能 | | —————————– | —————————————– | | time_after(unkown, known) | unkown>known 超时 返回真,否则返回假 | | time_after_eq(unkown, known) | unkown>=known 刚超时 返回真,否则返回假 | | time_before(unkown, known) | unkown<known 未超时 返回真,否则返回假 | | time_before_eq(unkown, known) | unkown<=known 刚未超时 返回真,否则返回假 |
用法示例
unsigned long timeout;
timeout = jiffies + (2 * HZ); /* 超时的时间点 */
/*************************************
具体的代码
************************************/
/* 判断有没有超时 */
if(time_before(jiffies, timeout)) {
/* 超时未发生 */
} else {
/* 超时发生 */
}
ms us ns 和jiffies之间的相互转换函数API | 函数 | 功能 | | ——————————————- | ——————————- | | int jiffies_to_msecs(const unsigned long j) | 将jiffies类型的参数 转换为 毫秒 | | int jiffies_to_usecs(const unsigned long j) | 将jiffies类型的参数 转换为 微秒 | | u64 jiffies_to_nsecs(const unsigned long j) | 将jiffies类型的参数 转换为 纳秒 | | long msecs_to_jiffies(const unsigned int m) | 将毫秒转换为jiffies类型 | | long usecs_to_jiffies(const unsigned int u) | 将微秒转换为jiffies类型 | | unsigned long nsecs_to_jiffies(u64 n) | 将纳秒转换为jiffies类型 |
1.8.2. 内核定时器
Linux内核使用 timer_list结构体表示内核定时器,基于内核系统时钟层面上的软件定时器
struct timer_list {
struct list_head entry;
unsigned long expires; /* 定时器超时时间,单位是节拍数 */
struct tvec_base *base;
void (*function)(unsigned long); /* 定时处理函数 */
unsigned long data; /* 要传递给function函数的参数 */
int slack;
};
内核定时器相关的系统的API函数 | 函数 | 功能 | | ———————————————————— | ———————————————————— | | void init_timer(struct timer_list *timer) | 初始化定时器。 | | void add_timer(struct timer_list *timer) | 向 Linux内核注册定时器 | | int del_timer(struct timer_list * timer) | 删除定时器,不管定时器有没有被激活,都可以使用此函数删除。返回值0:定时器还没被激活 1:定时器已经激活。 | | int mod_timer(struct timer_list *timer, unsigned long expires) | 函数用于修改定时值,如果定时器还没有激活的话,该函数会激活定时 |
使用示例
struct timer_list timer; /* 定义定时器 */
/* 定时器回调函数 */
void function(unsigned long arg)
{
/*
* 定时器处理代码
*/
/* 如果需要定时器周期性运行的话就使用mod_timer
* 函数重新设置超时值并且启动定时器。
*/
mod_timer(&dev->timertest, jiffies + msecs_to_jiffies(2000)); 14
}
/* 初始化函数 */
void init(void)
{
init_timer(&timer); /* 初始化定时器 */
timer.function = function; /* 设置定时处理函数 */
timer.expires=jffies + msecs_to_jiffies(2000);/* 超时时间2秒 */
timer.data = (unsigned long)&dev; /* 将设备结构体作为参数 */
add_timer(&timer); /* 启动定时器 */
}
/* 退出函数 */
void exit(void)
{
del_timer(&timer); /* 立即删除定时器 */
/* 或者使用 */
del_timer_sync(&timer); /* 会等定时器处理函数完成后在删除*/
}
1.8.3. 内核常用的短延时函数
| 函数 | 功能 |
|---|---|
| void ndelay(unsigned long nsecs) | 纳秒 延时函数 |
| void udelay(unsigned long usecs) | 微秒 延时函数 |
| void mdelay(unsigned long mseces) | 毫秒 延时函数 |
1.9. Cortex-A7中断系统
1.9.1. 中断向量表
| 向量地址 | 中断类型 | 中断模式 |
|---|---|---|
| 0X00 | 复位中断(Rest) | 特权模式(SVC) |
| 0X04 | 未定义指令中断(Undefined Instruction) | 未定义指令中止模式(Undef) |
| 0X08 | 软中断(Software Interrupt,SWI) | 特权模式(SVC) |
| 0X0C | 指令预取中止中断(Prefetch Abort) | 中止模式 |
| 0X10 | 数据访问中止中断(Data Abort) | 中止模式 |
| 0X14 | 未使用(Not Used)未使用0X18IRQ中断 (IRQ Interrupt) | 外部中断模式(IRQ) |
| 0X18 | IRQ中断 (IRQ Interrupt) | 外部中断模式(IRQ) |
| 0X1C | FIQ中断 (FIQ Interrupt) | 快速中断模式(FIQ) |
我们常见的SDMA_IRQn UART_IRQn等中断都是通过0X18地址的IRQ传递
1.9.2. GIC 控制器简介
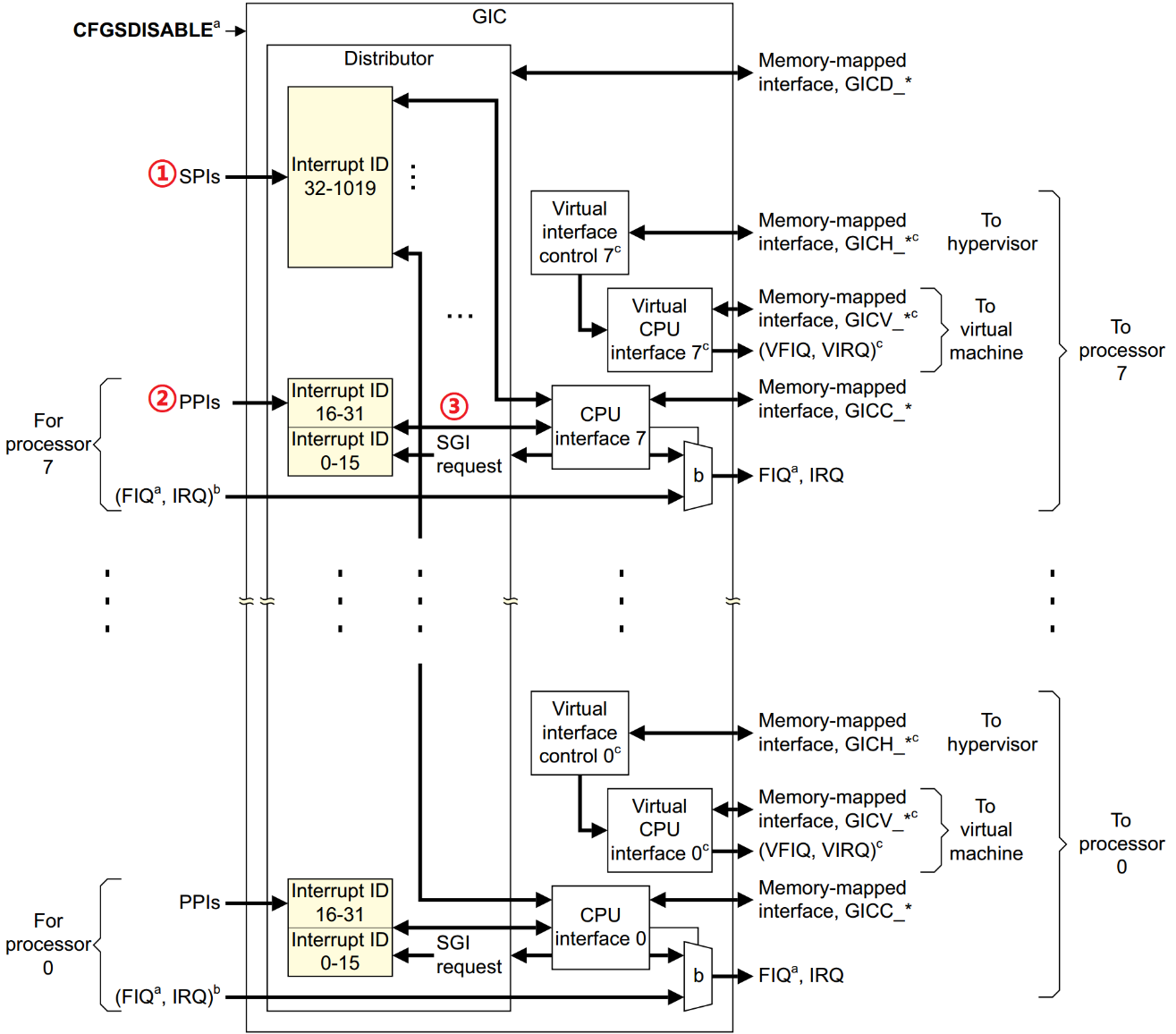
SPI(Shared Peripheral Interrupt),共享中断,顾名思义,所有 Core共享的中断,这个是最 常见的,那些外部中断都属于 SPI中断 (注意!不是 SPI总线那个中断 ) 。比如按键中断、串口 中断等等,这些中断所有的 Core都可以处理,不限定特定 Core。
PPI(Private Peripheral Interrupt),私有中断,我们说了 GIC是支持多核的,每个核肯定 有自己独有的中断。这些独有的中断肯定是要指 定的核心处理,因此这些中断就叫做私有中断。
SGI(Software-generated Interrupt),软件中断,由软件触发引起的中断,通过向寄存器 GICD_SGIR写入数据来触发,系统会使用 SGI中断来完成多核之间的通信。
1.9.3. 中断ID
中断源有很多,为了区分这些不同的中断源肯定要给他们分配一个唯一 ID,这些ID就是 中断ID。每一个CPU最多支持 1020个中断 ID,中断ID号为 ID0~ID1019。这1020个ID包 含了PPI、SPI和SGI,那么这三类中断是如何分配这 1020个中断 ID的呢?这 1020个ID分 配如下:
ID0~ID15:这 16个 ID分配给 SGI。
ID16~ID31:这 16个 ID分配给 PPI。
ID32~ID1019:这 988个 ID分配给 SPI,像 GPIO中断、串口中断等这些外部中断
至于具体到某个ID对应哪个中断那 就由半导体厂商根据实际情况去定义了。比如 I.MX6U的总共 使用了128个中断 ID,加上前面属于 PPI和 SGI的 32个ID I.MX6U的中断源共有 128+32=160个. 这128个中断ID对应的中断在《 I.MX6ULL参考手册》的[3.2 Cortex A7 interrupts]有定义, 限于篇幅原因,摘部分如下。
#define NUMBER_OF_INT_VECTORS 160 /* 中断源160个,SGI+PPI+SPI*/
typedef enum IRQn {
/* Auxiliary constants */
NotAvail_IRQn = -128,
/* Core interrupts */
Software0_IRQn = 0,
Software1_IRQn = 1,
Software2_IRQn = 2,
Software3_IRQn = 3,
Software4_IRQn = 4,
Software5_IRQn = 5,
Software6_IRQn = 6,
Software7_IRQn = 7,
Software8_IRQn = 8,
Software9_IRQn = 9,
Software10_IRQn = 10,
Software11_IRQn = 11,
Software12_IRQn = 12,
Software13_IRQn = 13,
Software14_IRQn = 14,
Software15_IRQn = 15,
VirtualMaintenance_IRQn = 25,
HypervisorTimer_IRQn = 26,
VirtualTimer_IRQn = 27,
LegacyFastInt_IRQn = 28,
SecurePhyTimer_IRQn = 29,
NonSecurePhyTimer_IRQn = 30,
LegacyIRQ_IRQn = 31,
/* Device specific interrupts */
IOMUXC_IRQn = 32,
DAP_IRQn = 33,
SDMA_IRQn = 34,
TSC_IRQn = 35,
SNVS_IRQn = 36,
...... ......
ENET2_1588_IRQn = 153,
Reserved154_IRQn = 154,
Reserved155_IRQn = 155,
Reserved156_IRQn = 156,
Reserved157_IRQn = 157,
Reserved158_IRQn = 158,
PMU_IRQ2_IRQn = 159
}IRQn_Type;
1.9.4. linux中断常用API函数
1.9.4.1. 申请中断
/*
*
* @irq:要申请中断的中断号。
* @handler:中断处理函数,当中断发生以后就会执行此中断处理函数。
* @flags :中断标志,可以在文件include/linux/interrupt.h里面查看定义
* @name :中断名字,设置以后可以在 /proc/interrupts文件中看到对应的中断名字。
* @dev :如果将 flags设置为 IRQF_SHARED的话,dev用来区分不同的中断,一般情况下将dev设置为设备结构体,
* dev会传递给中断处理函数 irq_handler_t的第二个参数。
* @return :返回值:0 中断申请成功,其他负值 中断申请失败,如果返回 -EBUSY的话表示中断已经被申请了
*/
int request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags, const char *name, void *dev)
flags 参数常用的一些如下: | 标志 | 描述 | | ——————– | ———————————————————— | | IRQF_SHARED | 多个设备共享一个中断线,如果使用共享中断的话,dev参数就是唯一区分他们的标志 | | IRQF_ONESHOT | 单次中断,中断执行一次就 结束 | | IRQF_TRIGGER_NONE | 无触发 | | IRQF_TRIGGER_RISING | 上升沿触发 | | IRQF_TRIGGER_FALLING | 下降沿触发 | | IRQF_TRIGGER_HIGH | 高电平 触发 | | IRQF_TRIGGER_LOW | 低电平触发 |
1.9.4.2. 释放中断
/*
*
* @irq:要释放中断的中断号。
* @dev :如果将 flags设置为 IRQF_SHARED的话,dev用来区分不同的中断,共享中断只有在释放最后中断处理函数的时候才会被禁止掉。
* dev会传递给中断处理函数 irq_handler_t的第二个参数。
*/
void free_irq(unsigned int irq, void *dev)
1.9.4.3. 中断处理函数
irqreturn_t (*irq_handler_t) (int, void *)
//返回值如下:
enum irqreturn {
IRQ_NONE = (0 << 0),
IRQ_HANDLED = (1 << 0),
IRQ_WAKE_THREAD = (1 << 1),
};
typedef enum irqreturn irqreturn_t;
//可以看出irqreturn_t是个枚举类型,一共有三种返回值。一般中断服务函数返回值使用如下形式:
return IRQ_RETVAL(IRQ_HANDLED)
1.9.4.4. 中断使能与禁止函数
void enable_irq(unsigned int irq)
void disable_irq(unsigned int irq)
注意 :函数要等到当前正在执行的中断处理函数执行完才返回,因此使用者需要保证不会产生新的中 断,并且确保所有已经开始执行的中断处理程序已经全部退出。在这种情况下,可以使用另外 一个中断禁止函数:
void disable_irq_nosync(unsigned int irq) // 立即返回
关闭使能整个中断系统
local_irq_enable()
local_irq_disable()
local_irq_save(flags)
local_irq_restore(flags)
1.9.4.5. 中断上下半部
如果要处理的内容不希望被其他中断打断,那么可以放到上半部;
如果要处理的任务对时间敏感,可以放到上半部;
如果要处理的任务与硬件有关,可以放到上半部;
除了上述三点以外的其他任务,优先考虑放到下半部。
上半部处理很简单,直接编写中断处理函数就行了,关键是下半部该怎么做呢?
1.9.4.5.1. 下半部处理机制
1.9.4.5.1.1. 软中断
/* 体定义在文件 include/linux/interrupt.h中,内容如下*/
struct softirq_action
{
void (*action)(struct softirq_action *);
};
/*在 kernel/softirq.c文件中一共定义了 10个软中断,如下所示:*/
static struct softirq_action softirq_vec[NR_SOFTIRQS];
/*NR_SOFTIRQS是枚举类型,定义在文件 include/linux/interrupt.h中,定义如下:*/
enum {
HI_SOFTIRQ=0, /* 高优先级软中断 */
TIMER_SOFTIRQ, /* 定时器软中断 */
NET_TX_SOFTIRQ, /* 网络数据发送软中断 */
NET_RX_SOFTIRQ, /* 网络数据接收软中断 */
BLOCK_SOFTIRQ,
BLOCK_IOPOLL_SOFTIRQ,
TASKLET_SOFTIRQ, /* tasklet软中断 */
SCHED_SOFTIRQ, /* 调度软中断 */
HRTIMER_SOFTIRQ, /* 高精度定时器软中断 */
RCU_SOFTIRQ, /* RCU软中断 */
NR_SOFTIRQS
};
注册对应的软中断处理函数
/*
* @nr: 要开启的软中断类型 上面的枚举中选一个
* @action:软中断对应的处理函数。
*/
void open_softirq(int nr, void (*action)(struct softirq_action *))
函数触发
void raise_softirq(unsigned int nr)
注意:软中断必须在编译的时候静态注册
1.9.4.5.1.2. tasklet(小任务)
tasklet是利用软中断来实现的另外一种下半部机制,在软中断和 tasklet之间,建议大家使用tasklet linux中关于tasklet的定义
struct tasklet_struct
{
struct tasklet_struct *next; /* 下一个tasklet */
unsigned long state; /* tasklet状态 */
atomic_t count; /* 计数器,记录对tasklet的引用数 */
void (*func)(unsigned long); /* tasklet执行的函数需要用户自己定义 */
unsigned long data; /* 函数func的参数 */
};
初始化函数
/*
*@t:要初始化的 tasklet
*@func: tasklet的处理函数用户定义好后传入函数指针即可
*@data: 要传递给 func函数的参数
*/
void tasklet_init(struct tasklet_struct *t,void (*func)(unsigned long), unsigned long data);
也可以使用宏一次完成定义和初始化
定义在 include/linux/interrupt.h
DECLARE_TASKLET(name, func, data)
/*
*@t:要调度的 tasklet,也就是 DECLARE_TASKLET宏里面的 name
*/
void tasklet_schedule(struct tasklet_struct *t)
使用示例
/* 定义taselet */
struct tasklet_struct testtasklet;
/* tasklet处理函数 */
void testtasklet_func(unsigned long data)
{
/* tasklet具体处理内容 */
}
/* 中断处理函数 */
irqreturn_t test_handler(int irq, void *dev_id)
{
......
/* 调度tasklet */
tasklet_schedule(&testtasklet); /*让testtasklet在合适的时机引起调度*/
......
}
/* 驱动入口函数 */
static int __init xxxx_init(void)
{
......
/* 初始化tasklet */
tasklet_init(&testtasklet, testtasklet_func, data); /* 注册中断处理函数 */
request_irq(xxx_irq, test_handler, 0, "xxx", &xxx_dev);
......
}
1.9.4.5.1.3. work queue工作队列
工作队列是另外一种下半部执行方式,工作队列在进程上下文执行,工作队列将要推后的工作交给一个内核线程去执行,因为工作队列工作在进程上下文,因此工作队列允许睡眠或重新调度。因此如果你要推后的工作可以睡眠那么就可以选择工作队列,否则的话就只能选择软中断或tasklet linux中work_struct结构体表示一个工作,内容如下
struct work_struct {
atomic_long_t data;
struct list_head entry;
work_func_t func; /* 工作队列处理函数 */
};
这些工作组织成工作队列,工作队列使用 workqueue_struct结构体表示,内容如下
struct workqueue_struct {
struct list_head pwqs;
struct list_head list;
struct mutex mutex;
int work_color;
int flush_color;
atomic_t nr_pwqs_to_flush;
struct wq_flusher *first_flusher;
struct list_head flusher_queue;
struct list_head flusher_overflow;
struct list_head maydays;
struct worker *rescuer;
int nr_drainers;
int saved_max_active;
struct workqueue_attrs *unbound_attrs;
struct pool_workqueue *dfl_pwq;
char name[WQ_NAME_LEN];
struct rcu_head rcu;
unsigned int flags ____cacheline_aligned;
struct pool_workqueue __percpu *cpu_pwqs;
struct pool_workqueue __rcu *numa_pwq_tbl[];
};
Linux内核使用工作者线程 (worker thread)来处理工作队列中的各个工作, Linux内核使用worker结构体表示工作者线程, worker结构体内容如下:
struct worker {
union {
struct list_head entry;
struct hlist_node hentry;
};
struct work_struct *current_work; work_func_t current_func;
struct pool_workqueue *current_pwq;
bool desc_valid;
struct list_head scheduled;
struct task_struct *task;
struct worker_pool *pool;
struct list_head node;
unsigned long last_active;
unsigned int flags;
int id;
char desc[WORKER_DESC_LEN];
struct workqueue_struct *rescue_wq;
};
可以看出,每个worker都有一个工作队列,工作者线程处理自己工作队列中的所有工作。在实际的驱动开发中,我们只需要定义工作 (work_struct)即可,关于工作队列和工作者线程我们基本不用去管。初始化一个工作
/*
*@_work: 自己定义的 work_struct
*@_func: 处理函数 需要用户自己定义
*/
#define INIT_WORK(_work, _func)
或者直接使用宏一次性完成定义和初始化
/*
*@n: 自己定义的 work_struct
*@f: 处理函数 需要用户自己定义
*/
#define DECLARE_WORK(n, f)
和 tasklet一样,工作也是需要调度才能运行的,工作的调度函数为 schedule_work,函数原型如下所示: bool schedule_work(struct work_struct *work)
使用示例代码
/* 定义工作(work) */
struct work_struct testwork;
/* work处理函数 */
void testwork_func_t(struct work_struct *work);
{
/* work具体处理内容 */
}
/* 中断处理函数 */
irqreturn_t test_handler(int irq, void *dev_id)
{
......
/* 调度work */
schedule_work(&testwork);
......
}
/* 驱动入口函数 */
static int __init xxxx_init(void)
{
......
/* 初始化work */
INIT_WORK(&testwork, testwork_func_t);
/* 注册中断处理函数 */
request_irq(xxx_irq, test_handler, 0, "xxx", &xxx_dev);
......
}
1.9.4.5.1.4. 新技术threaded irq
/*
*@irq: 中断号
*@handler: 中断服务函数,可以为空
*@thread_fn:线程函数
*@flags:
*@name:
*@dev:
*/
extern __must_check
request_threaded_irq(unsigned int irq, irq_handler_t handler,irq_handler_t thread_fn, unsigned long flags, const char *name ,void *dev)
你可以只提供thread_fn ,系统会为这个函数创建一个内核线程。发生中断时,内核线程就会执行这个函数。 说你懒是开玩笑,内核开发者也不会那么在乎懒人。 以前用 work 来线程化地处理中断,一个 worker 线程只能由一个 CPU 执行,多个中断的 work 都由同一个worker 线程来处理, 在单 CPU 系统中也只能忍着了。但是在 SMP 系统中,明明有那么多CPU 空着,你偏偏让多个中断挤在这个 CPU 上? 新技术threaded irq ,为每一个中断都创建一个内核线程;多个中断的内核线程可以分配到多个 CPU上执行,这提高了效率。
1.9.5. 设备树对中断解析
imx6ull.dtsi文件,其中的intc就是中断控制器节点
intc: interrupt-controller@00a01000 {
compatible = "arm,cortex-a7-gic";/* 可以通过该属性在内核里面找到GIC控制器驱动代码 */
#interrupt-cells = <3>;
interrupt-controller; /* 节点为空,表示当前节点是中断控制器 */
reg = <0x00a01000 0x1000>,
<0x00a02000 0x100>;
};
第一个 cells:中断类型,0表示 SPI中断,1表示 PPI中断。
第二个 cells:中断号,对 于SPI中断来说中断号的范围为 0~987,对于 PPI中断来说中断号的范围为 0~15
第三个 cells:标志
bit[3:0]表示中断触发类型,
1的时候表示上升沿触发
2的时候表示下降沿触发
4的时候表示高电平触发
8的时候表示低电平触发
bit[15:8]为 PPI中断的CPU掩码。
对于gpio来说,gpio节点也可以作为中断控制器,比如 imx6ull.dtsi文件中的 gpio5节点内容如下所示:
gpio5: gpio@020ac000 {
compatible = "fsl,imx6ul-gpio", "fsl,imx35-gpio";
reg = <0x020ac000 0x4000>;
interrupts = <GIC_SPI 74 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 75 IRQ_TYPE_LEVEL_HIGH>;
gpio-controller;
#gpio-cells = <2>;
interrupt-controller; //表明了 gpio5节点也是个中断控制器用于控制gpio5所有IO的中断
#interrupt-cells = <2>; //interrupt-cells修改为2
};
GPIO5一共用了2个中断号,一个是74,一个是75。可以打开《 IMX6ULL参考手册》的【Chapter 3 Interrupts and DMA Events】章节, 找到表3-1可以确定
74对应 GPIO5_IO00~GPIO5_IO15 这低 16个 IO
75对应 GPIO5_IO16~GPIOI5_IO31这高 16位 IO
在imx6ull-alientek-emmc.dts文件,我们又可以发现:
fxls8471@1e {
compatible = "fsl,fxls8471";
reg = <0x1e>;
position = <0>;
interrupt-parent = <&gpio5>; //设置中断控制器,这里使用 gpio5作为中断控制器。
interrupts = <0 8>; //0表示 GPIO5_IO00 8表示低电平触发。
};
xls8471是 NXP官方的 6ULL开发板上的一个磁力计芯片,fxls8471有一个中断引脚链接到了I.MX6ULL的 SNVS_TAMPER0因脚上,这个引脚可以复用为GPIO5_IO00所以当我们在fxls8471驱动代码里面就可以得到中断控制的所有信息找到中断号
/*
*@dev : 设备节点。
*@index : 索引号 interrupts属性可能包含多条中断信息,通过 index指定要获取的信息。
*@return:中断号
*/
unsigned int irq_of_parse_and_map(struct device_node *dev, int index)
如果是GPIO中断,可以使用下面函数来获取 gpio对应的中断号,函数原型如
/*
*@gpio : 要获取GPIO编号。
*@return:GPIO对应中断号
*/
int gpio_to_irq(unsigned int gpio)
1.9.5.1. 其它的外设驱动代码获取中断的情况
之前我们提到过,设备树中的节点有些能被转换为内核里的platform_device有些不能转换(转换规则请参考前面章节),
1.9.5.1.1. 对于能转换为platform_device的获取方式
/*
* platform_get_resource get a resource for a device
@dev: platform device
@type: resource type // 取哪类资源? IORESOURCE_MEM 、 IORESOURCE_REG、IORESOURCE_IRQ 等
@num: resource inde x // 这类资源中的哪一个?
*/
struct resource *platform_get_resource(struct platform_device *dev,unsigned int type, unsigned int num);
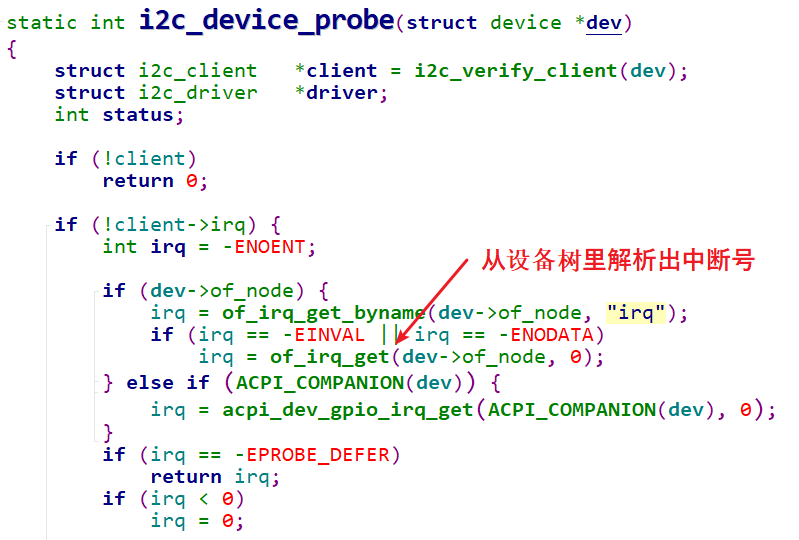
1.9.5.1.2. 对于I2C 设备节点
I2C总线驱动在处理设备树里的I2C子节点时,也会处理其中的中断信息。一个I2C 设备会被转换为一个 i2c_client 结构体,中断号会保存在 i2c_client 的 irq 成员里,代码如下
drivers/i2c/i2c core.c
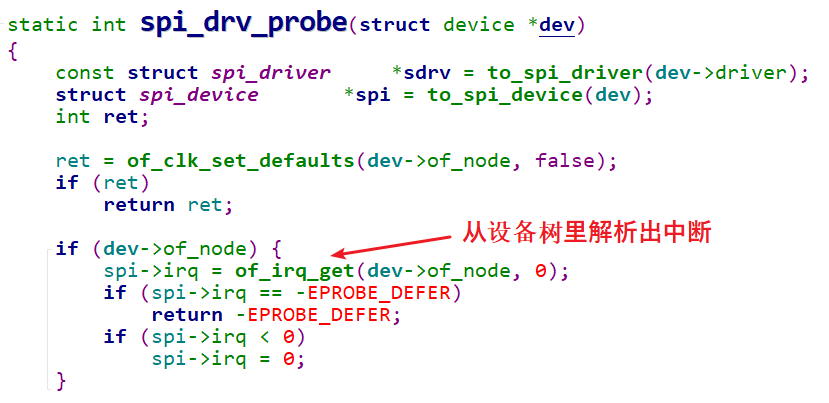
 对于SPI 设备节点
对于SPI 设备节点
1.9.5.1.3. SPI总线驱动在处理设备树里的 SPI子节点时,也会处理其中的中断信息。
一个SPI 设备会被转换为一个 spi_device 结构体,中断号会保存在 spi_device 的 irq 成员里,代码如下
drivers/spi/spi.c
1.9.5.1.4. 调用 of_irq_get 获得中断号
如果你的设备节点既不能转换为platform_device ,它也不是 I2C 设备,不是 SPI 设备,那么在驱动程 序中可以自行调用 of_irq_get 函数去解析设备树,得到中断号。
1.9.5.1.5. 对于GPIO
参考:drivers input keyboard gpio_keys.c,可以使用gpio_to_irq 或 gpiod_irq 获得中断号。 举例,假设在设备树中有如下节点:
gpio-keys {
compatible = "gpio keys";
pinctrl-names = "default";
user{
label = "User Button";
gpios = <&gpio5 1 GPIO_ACTIVE_HIGH>;
gpio-key,wakeup;
linux,code = <KEY_1>;
};
};
那么可以使用下面的函数获得引脚和 flags
button->gpio = of_get_gpio_flags(pp, 0, &flags);
bdata->gpiod = gpio_to_desc(button->gpio);
再去使用gpiod_to_irq 获得中断号:
irq = gpiod_to_irq(bdata ->gpiod);
1.10. 阻塞和非阻塞IO
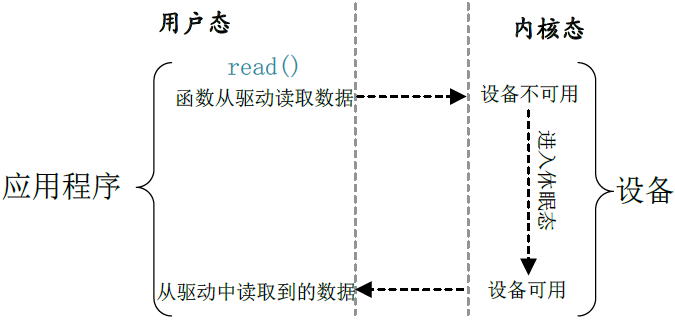
1.10.1. 阻塞访问
应用程序调用read 函数从设备中读取数据,当设备不可用或数据未准备好的时候就会进入到休眠态。等设备可用的时候就会从休眠态唤醒,然后从设备中读取数据返回给应用程序。
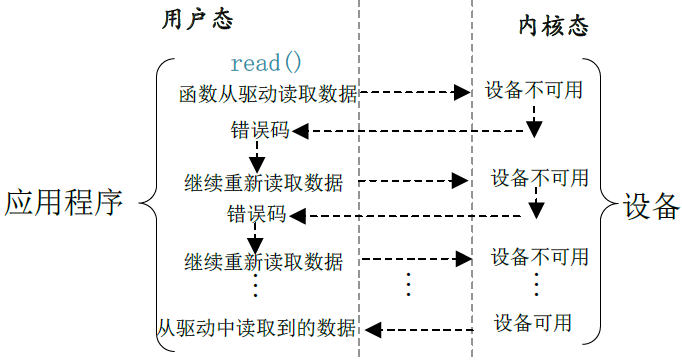
1.10.2. 非阻塞访问
应用程序使用非阻塞访问方式从设备读取数据,当设备不可用或数据未准备好的时候会立即向内核返回一个错误码,表示数据读取失败。应用程序会再次重新读取数据,这样一直往复循环,直到数据读取成功。
1.10.3. 应用程序示例
fd = open("/dev/xxx_dev", O_RDWR); /* 阻塞方式打开,也是默认的方式 */
ret = read(fd, &data, sizeof(data)); /* 读取数据 */
fd = open("/dev/xxx_dev", O_RDWR | O_NONBLOCK); /* 非阻塞方式打开 */
ret = read(fd, &data, sizeof(data)); /* 读取数据 */
参数:O_NONBLOCK
表示以非阻塞方式打开设备,这样从设备中读取数据的时候就是非阻塞方式的了
1.10.4. 阻塞方式访问 等待队列
等待队列头
结构体定义在文件 include/linux/wait.h中 struct __wait_queue_head { spinlock_t lock; struct list_head task_list; }; typedef struct __wait_queue_head wait_queue_head_t; void init_waitqueue_head(wait_queue_head_t *q) //等待队列头初始化 DECLARE_WAIT_QUEUE_HEAD(name) //一次性完成等待队列头创建和初始化,名字为name
等待队列项 等待队列头就是一个等待队列的头部,每个访问设备的进程都是一个等待队列项,当设备不可用的时候就要将这些进程对应的等待队列项添加到等待队列里面。 队列项结构体定义如下:
struct __wait_queue { unsigned int flags; void *private; wait_queue_func_t func; struct list_head task_list; }; typedef struct __wait_queue wait_queue_t;
创建并初始化队列项宏如下
/* *功能:定义并初始化一个等待队列项 *@name:队列项的名字 *@tsk:这个等待队列项属于哪个任务 (进程 ),一般设 置 为current,在 Linux内核中 current相当于一个全局变量,表示当前进程 */ DECLARE_WAITQUEUE(name, tsk)
将队列项添加 /移除等待队列头
/* *功能:将队列项添加到队列头 *@q :要加入到哪个等待队列头。 *@wait:要加入的等待队列项 */ void add_wait_queue(wait_queue_head_t *q, wait_queue_t *wait) /* *功能:将队列项添加到队列头 *@q :要从哪个等待队列头删除。 *@wait:要删除的等待队列项 */ void remove_wait_queue(wait_queue_head_t *q, wait_queue_t *wait)
等待唤醒
/* *功能:当设备可以使用的时候就要唤醒进入休眠态的进程,唤醒可以使用如下两个函数, * 这个等待队列头中的所有进程都唤醒 *@q :要唤醒的等待队列头指针。 */ void wake_up(wait_queue_head_t *q) // TASK_INTERRUPTIBLE和 TASK_UNINTERRUPTIBLE状态的进程 void wake_up_interruptible(wait_queue_head_t *q)//只能唤醒处于 TASK_INTERRUPTIBLE状态的进程
等待事件 除了主动唤醒以外,也可以设置等待队列等待某个事件,当这个事件满足以后就自动唤醒等待队列中的进程 和等待事件有关的 API函数所示:
| 函数 | 功能 |
|---|---|
| wait_event(wq, condition) | 等待以wq为等待队列头的等待队列被唤醒,前提是 condition条件必须满足 (为真 ),否则一直阻塞。此函数会将进程设置为TASK_UNINTERRUPTIBLE状态 |
| wait_event_timeout(wq, condition, timeout) | 功能和wait_event类似,但是此函数可以添加超时时间,以 jiffies为单位。此函数有返回值,如果返回0的话表示超时时间到,而且 condition为假。为 1的话表示 condition为真,也就是条件满足了。 |
| wait_event_interruptible(wq, condition) | 与wait_event函数类似,但是此函数将 进程设置为 TASK_INTERRUPTIBLE,就是可以被信号打断。 |
| wait_event_interruptible_timeout(wq, condition, timeout) | 与wait_event_timeout函数类似,此函数也 将 进程设置为 TASK_INTERRUPTIBLE,可以被信号打断。 |
1.10.5. 非阻塞访问 轮询
非阻塞方式访问 当应用程序调用select、 epoll或 poll函数的时候设备驱动程序中的 poll函数就会执行,因此需要在设备驱动程序中编写poll函数epoll更多的是用在大规模的并发服务器上,因为在这种场合下 select和 poll并不适合。当设计到的文件描述符 (fd)比较少的时候就适合用 selcet和 poll
1.10.5.1. select 函数
/*
*@功能 :
*@nfds :所要 监视的这三类文件描述集合中, 最大文件描述符加 1
*@readfds :都代表了一个文件描述符。 readfds用于监视指定描述符集的读变化,
* 也就是监视这些文件是否可以读取,
* 只要这些集合里面有一个文件可以读取那么 seclect就会返回一个
* 大于 0的值表示文件可以读取。如果没有文件可以读取,
* 那么就会根据 timeout参数来判断是否超时。可以将 readfs设置为 NULL,
* 表示不关心任何文件的读变化。
*@writefds :writefds和 readfs类似,只是 writefs用于监视这些文件是否可以进行写操作。
*@exceptfds:用于监视这些文件的异常。
*@timeout :超时时间 当 timeout为 NULL的时候就表示无限期的等待。
* struct timeval {
* long tv_sec; 秒
* long tv_usec; 微妙
* };
*@返回值:0,表示的话就表示超时发生,但是没有任何文件描述符可以进行操作 ;
* -1,发生错误;
* 其他值,可以进行操作的文件描述符个数。
*/
int select(int nfds, fd_set *readfds, fd_set *writefds, fd_set *exceptfds, struct timeval *timeout)
| 函数 | 功能 |
|---|---|
| void FD_ZERO(fd_set *set) | fd_set变量的所有位都清零 |
| void FD_SET(int fd, fd_set *set) | fd_set 变量的某个位置 1也就是向 fd_set添加一个文件描述符 |
| void FD_CLR(int fd, fd_set *set) | fd_set变量的某个位清零,也就是将一个文件描述符从fd_set中删除 |
| int FD_ISSET(int fd, fd_set *set) | FD_ISSET用于 测试一个文件是否属于某个集合 |
在应用程序使用示例:
void main(void)
{
int ret, fd; /* 要监视的文件描述符 */
fd_set readfds; /* 读操作文件描述符集 */
struct timeval timeout; /* 超时结构体 */
fd = open("dev_xxx", O_RDWR | O_NONBLOCK); /* 非阻塞式访问 */
FD_ZERO(&readfds); /* 清除readfds */
FD_SET(fd, &readfds); /* 将fd添加到readfds里面 */
/* 构造超时时间 */
timeout.tv_sec = 0;
timeout.tv_usec = 500000; /* 500ms */
ret = select(fd + 1, &readfds, NULL, NULL, &timeout); /* 在500ms内会一直轮询查询 注:不会挂起线程,cpu被占着*/
switch (ret) {
case 0: /* 超时 */
printf("timeout!\r\n");
break;
case -1: /* 错误 */
printf("error!\r\n");
break;
default: /* 可以读取数据 */
if(FD_ISSET(fd, &readfds)) { /* 判断是否为fd文件描述符 */
/* 使用read函数读取数据 */
}
break;
}
}
1.10.5.2. poll 函数
在单个线程中, select函数能够监视的文件描述符 数量有最大的限制,一般为 1024,可以 修改内核将监视的文件描述符数量改大,但是这样会降低效率!这个时候就可以使用 poll函数, poll函数本质上和 select没有太大的差别,但是 poll函数没有最大文件描述符限制,
/*
*@功能 :
*@fds :要监视的文件描述符集合以及要监视的事件 是数组,数组元素都是结构体 pollfd类型的,
* struct pollfd {
* int fd; //要监视的文件描述符,如果 fd无效 events监视事件也就无效,且 revents返回0
* short events; //请求的事件 是要监视的事件,可监视的事件类型如下所示:
* short revents; //返回的事件由 Linux内核设置具体的返回事件。
* };
* events 类型如下:
* POLLIN 有数据可以读取。
* POLLPRI 有紧急的数据需要读取。
* POLLOUT 可以写数据。
* POLLERR 指定的文件描述符发生错误。
* POLLHUP 指定的文件描述符挂起。
* POLLNVAL 无效的请求。
* POLLRDNORM 等同于 POLLIN
*
*@nfds :poll函数要监视的文件描述符数量
*@timeout :超时时间超时时间,单位为 ms
*@返回值 :revents域中不为 0的 pollfd结构体个数,也就是发生事件或错误的文件描述符数量;
* 0,超时 ;
* -1,发生错误,并且设置 errno为错误类型。
*/
int poll(struct pollfd *fds, nfds_t nfds, int timeout)
非阻塞式访问示例:
void main(void)
{
int ret;
int fd; /* 要监视的文件描述符 */
struct pollfd fds;
fd = open(filename, O_RDWR | O_NONBLOCK); /* 非阻塞式访问 */
/* 构造pollfd结构体 */
fds.fd = fd;
fds.events = POLLIN; /* 监视数据是否可以读取 */
ret = poll(&fds, 1, 500); /* 轮询文件是否可操作,超时500ms */
if (ret) { /* 数据有效 */
......
/* 读取数据 */
......
} else if (ret == 0) { /* 超时 */
......
} else if (ret < 0) { /* 错误 */
......
}
1.10.5.3. epoll 函数
传统的 selcet和 poll函数都会随着所监听的 fd数量的增加,出现效率低下的问题,而且poll函数每次必须遍历所有的描述符来检查就绪的描述符,这个过程很浪费时间。为此,epoll应运而生 epoll就是为处理大并发而准备的,一般常常在网络编程中使用epoll函数。
创建 epoll句柄
/*
*@功能 :创建一个 epoll句柄,
*@size :无意义,随便填个大于0的值即可
*@返回值:epoll句柄,如果为 -1的话表示创建失败。
*/
int epoll_create(int size)
添加监视的文件描述符
/*
*@功能 :添加监视的文件描述符以及监视的事件
*@epfd :要操作的 epoll句柄 epoll_create函数返回值
*@op :表示要对 epfd(epoll句柄 )进行的操作,可以设置为:
* EPOLL_CTL_ADD 向 epfd添加文件参数 fd表示的描述符
* EPOLL_CTL_MOD 修改参数 fd的 event事件
* EPOLL_CTL_DEL 从 epfd中删除 fd描述符
*@fd :要监视的文件描述符
*@event :要监视的事件类型,
* struct epoll_event {
* uint32_t events; // epoll事件
* epoll_data_t data; // 用户数据
* };
* events 这些事件可以进行“或”操作,也就是说可以设置监视多个事件 类型如下:
* EPOLLIN 有数据可以读取
* EPOLLOUT 可以写数据
* EPOLLPRI 有紧急的数据需要读取
* EPOLLERR 指定的文件描述符发生错误
* EPOLLHUP 指定的文件描述符挂起
* EPOLLET 设置 epoll为边沿触发,默认触发模式为水平触发。
* EPOLLONESHOT 一次性的监视,当监视完成以后还需要再次监视某个fd,那么就需要将fd重新添加到 epoll里面。
*@返回值:0,成功 ;-1,失败,并且设置 errno的值为 相应的错误码。
*/
int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event)
函数来等待事件的发生
/*
*@功能 :函数来等待事件的发生,类似 select函数。
*@epfd :要等待的 epoll
*@events :指向 epoll_event结构体的数组,当有事件发生的时候 Linux内核会填写 events,
* 调用者可以根据 events判断发生了哪些事件。
*@maxevents :events数组大小,必须大于 0
*@timeout :超时时间,单位为 ms
*@返回值:,超时 ;-1,错误;其他值,准备就绪的文件描述符数量。
*/
int epoll_wait(int epfd, struct epoll_event *events, int maxevents, int timeout)
1.10.6. Linux驱动下的 poll操作函数
当应用程序调用 select或 poll函数来对驱动程序进行非阻塞访问的时候,驱动程序 file_operations操作集中的 poll函数就会执行。所以驱动程序的编写者需要提供对应的 poll函 数, poll函数原型如下所示:
/*
*@功能 :
*@filp :要打开的设备文件 (文件描述符 )。
*@wait :结构体 poll_table_struct类型指针, 由 应用程序传 递进来的。一般将此参数传递给poll_wait函数。
*@返回值 :向应用程序返回设备或者资源状态,可以返回的资源状态如下:
* POLLIN 有数据可以读取。
* POLLPRI 有紧急的数据需要读取。
* POLLOUT 可以写数据。
* POLLERR 指定的文件描述符发生错误。
* POLLHUP 指定的文件描述符挂起。
* POLLNVAL 无效的请求。
* POLLRDNORM 等同于 POLLIN,普通数据可读
*/
unsigned int (*poll) (struct file *filp, struct poll_table_struct *wait)
我们需要在驱动程序的 poll函数中调用 poll_wait函数, poll_wait函数不会引起阻塞,只是将应用程序添加到 poll_table中。
poll_wait函数原型如下:
/*
*@功能 :
*@filp :要打开的设备文件 (文件描述符 )。
*@wait_address :是要添加到 poll_table中的等待队列头
*@p: :就是file_operations中 poll函数的 wait参数
*/
void poll_wait(struct file * filp, wait_queue_head_t * wait_address, poll_table *p)
1.11. 异步通知
阻塞或者非阻塞的方式来读取驱动中按键值都是应用程序主动读取的,对于非阻塞方式来说还需要应用程序通过poll函数不断的轮询。最好的方式就是驱动程序能主动向应用程序发出通知,报告自己可以访问,然后应用程序在从驱动程序中读取或写入数据,类似于裸机的中断。Linux提供了异步通知这个机制来完成此功能, 异步通知的核心就是信号,在 arch/xtensa/include/uapi/asm/signal.h文件中定义了 Linux所支持的所有信号,这些信号如下所示:
#define SIGHUP 1 /* 终端挂起或控制进程终止 */
#define SIGINT 2 /* 终端中断(Ctrl+C组合键) */
#define SIGQUIT 3 /* 终端退出(Ctrl+\组合键) */
#define SIGILL 4 /* 非法指令 */
#define SIGTRAP 5 /* debug使用,有断点指令产生 */
#define SIGABRT 6 /* 由abort(3)发出的退出指令 */
#define SIGIOT 6 /* IOT指令 */
#define SIGBUS 7 /* 总线错误 */
#define SIGFPE 8 /* 浮点运算错误 */
#define SIGKILL 9 /* 杀死、终止进程 */
#define SIGUSR1 10 /* 用户自定义信号1 */
#define SIGSEGV 11 /* 段违例(无效的内存段) */
#define SIGUSR2 12 /* 用户自定义信号2 */
#define SIGPIPE 13 /* 向非读管道写入数据 */
#define SIGALRM 14 /* 闹钟 */
#define SIGTERM 15 /* 软件终止 */
#define SIGSTKFLT 16 /* 栈异常 */
#define SIGCHLD 17 /* 子进程结束 */
#define SIGCONT 18 /* 进程继续 */
#define SIGSTOP 19 /* 停止进程的执行,只是暂停 */
#define SIGTSTP 20 /* 停止进程的运行(Ctrl+Z组合键)
#define SIGTTIN 21 /* 后台进程需要从终端读取数据
#define SIGTTOU 22 /* 后台进程需要向终端写数据 */
#define SIGURG 23 /* 有"紧急"数据 */
#define SIGXCPU 24 /* 超过CPU资源限制 */
#define SIGXFSZ 25 /* 文件大小超额 */
#define SIGVTALRM 26 /* 虚拟时钟信号 */
#define SIGPROF 27 /* 时钟信号描述 */
#define SIGWINCH 28 /* 窗口大小改变 */
#define SIGIO 29 /* 可以进行输入/输出操作 */
#define SIGPOLL SIGIO
/* #define SIGLOS 29 */
#define SIGPWR 30 /* 断点重启 */
#define SIGSYS 31 /* 非法的系统调用 */
#define SIGUNUSED 31 /* 未使用信号 */
注意:这些信号中,除了 SIGKILL(9)和 SIGSTOP(19)这两个信号不能被忽略外,其他的信号都可以忽略
1.11.1. 应用程序对异步通知处理
static void sigio_signal_func(int signum)
{
int err = 0;
unsigned int keyvalue = 0;
err = read(fd, &keyvalue, sizeof(keyvalue));
if(err < 0) {
/* 读取错误 */
} else {
printf("sigio signal! key value=%d\r\n", keyvalue);
}
}
/*
* 1.注册信号SIGIO的处理函数
*/
signal(SIGIO, sigio_signal_func);
/*
* 2.将本应用程序的进程号告诉给内核
*/
fcntl(fd, F_SETOWN, getpid());
/*
* 3.开启异步通知
*/
flags = fcntl(fd, F_GETFD); /* 获取当前的进程状态 */
fcntl(fd, F_SETFL, flags | FASYNC); /* fcntl函数设置进程状态为 FASYNC,经过这一步,驱动程序中的 fasync函数就会执行。*/
注册signal函数原型如下所示
/*
*@功能 :
*@signum :要设置处理函数的信号
*@handler :信号的处理函数 typedef void (*sighandler_t)(int)
*@返回值 :设置成功的话返回信号的前一个处理函数,设置失败的话返回 SIG_ERR。
*/
sighandler_t signal(int signum, sighandler_t handler)
1.11.2. 驱动中信号处理
定义fasync_struct结构体指针
struct fasync_struct {
spinlock_t fa_lock;
int magic;
int fa_fd;
struct fasync_struct *fa_next;
struct file *fa_file;
struct rcu_head fa_rcu;
};
int fasync_helper(int fd, struct file * filp, int on, struct fasync_struct **fapp)
struct xxx_dev {
......
struct fasync_struct *async_queue; /* 异步相关结构体 */
};
static int xxx_fasync(int fd, struct file *filp, int on)
{
struct xxx_dev *dev = (xxx_dev)filp->private_data;
if (fasync_helper(fd, filp, on, &dev->async_queue) < 0) /*初始化fasync_struct结构体*/
return -EIO;
return 0;
}
static int xxx_release(struct inode *inode, struct file *filp)
{
return xxx_fasync(-1, filp, 0); /* 删除异步通知 */
}
static struct file_operations xxx_ops = {
......
.fasync = xxx_fasync,
.release = xxx_release,
......
};
当设备可以访问的时候,驱动程序需要向应用程序发出信号,相当于产生“中断”。 kill_fasync函数负责发送指定的信号,
/*
*@fp:要操作的 fasync_struct。
*@sig 要发送的信号。
*@band 可读时设置为 POLL_IN,可写时设置为 POLL_OUT。
*/
void kill_fasync(struct fasync_struct **fp, int sig, int band)
例如
kill_fasync(&xxx_dev->async_queue, SIGIO, POLL_IN);
这个时候,应用程序注册的信号的服务函数就会被调用